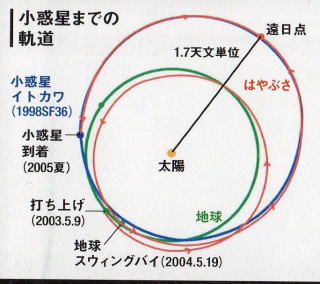
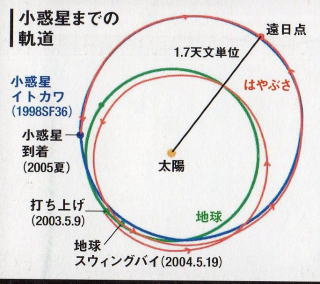
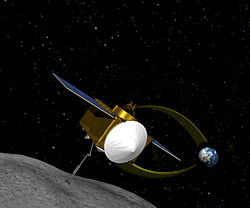
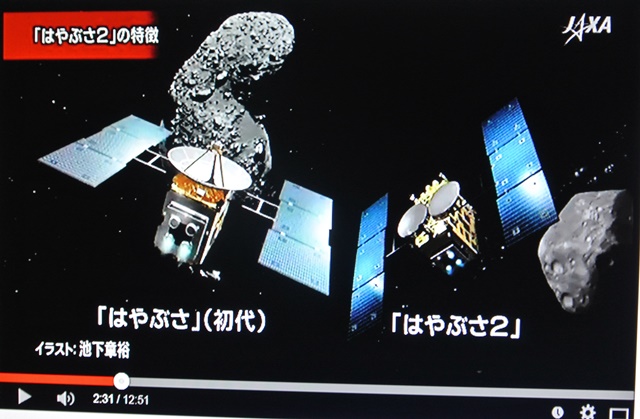
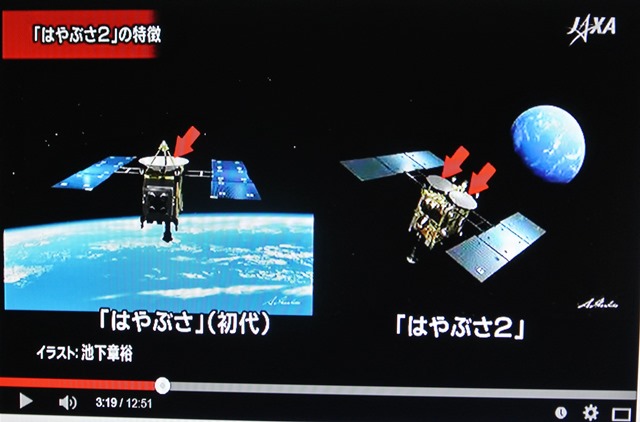
「 はやぶさ 」 (初代) (MUSES-C)は、2003年5月9日 に 宇宙科学研究所 が 打ち上げた 小惑星探査機 で 、
ひてん、はるか に 続 く MUSESシリーズ 3番目 の 工 学 実 験 機 である。
イオンエンジン の 実証試験 を 行いながら 2005年 夏 に アポロ群 の 小惑星 イトカワ に 到 達 し、
その表面を詳しく観測して サンプル 採集 を試みた後、2010年6月13日、60 億 km の 旅 を 終 え、
地 球 に 大気圏再突入 した。 地球重力圏 外にある 天体 の 固体表面 に 着 陸して の サンプルリターン に、
世 界 で 初 め て 成 功 し ま し た 。
途 中 、 度 重 な る 機 器 故 障 で 地 球 と の 交 信 が 不 能 となり、 宇 宙 迷 子 となりました。
しかし 、 技 術 者 の 賢 明 な 努 力 により 修 復 されて、劇 的 というか 奇 跡 的 に 帰 還 できました。
技 術 者 の 粘 り 強 い 努 力 根 性 に 感 激 しました


 ()
()
小 惑 星 イ ト カ ワ の 姿 ( Youtube 動 画 )
2003 . 5 発 射
Youtube




イ オ ン エンジン で 航 行 2010 . 6 帰 還 オーストラリア ウーメラ 砂 漠
Youtube
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
M y H P 宇 宙 に 関 す る 資 料
★ はやぶさ ( 初 代 ) の 大 冒 険 ★ 野 辺 山 国 立 天 文 台
★ G P S ( Global Positionig System ) ★ 宇 宙 物 語
★ 地 球 月 太 陽 ★ 宇 宙 探 査 機 に 関 す る 専 門 用 語
★ Michelson - Morley の 実 験 ★ 宇 宙 衛 星
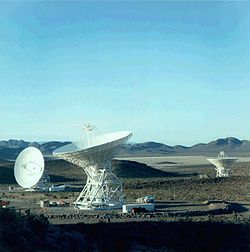
★ 臼 田 宇 宙 空 間 観 測 所 JAXA ★ 宇 宙 科 学 研 究 所 ISAS
★ アタカマ 大 型 ミリ 波 サブ ミリ 波 干 渉 計 Wikipedia
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
はやぶさ 2 の 追 跡
追 跡 開 始 2015 年 3 月 帰 還 まで 追 跡 できればよいが はやぶさ 2 Wikipedia
「 はやぶさ 2 」 の 運 航 計 画 予 定
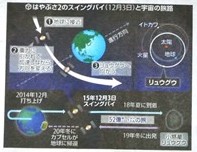
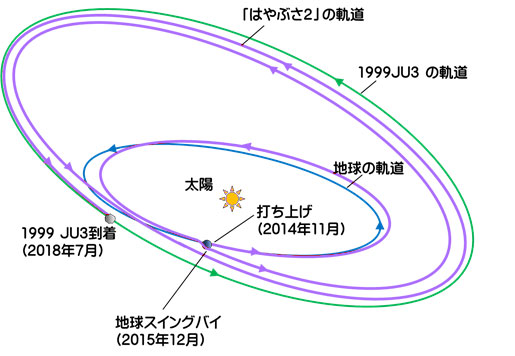
◆ 2014 年 1 2 月 3 日 種子島 宇 宙 センター 打ち上げ 50 億 k m の 挑 戦 に 旅 立 つ


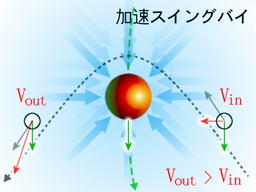
◆ 2015 年 11~12 月 地 球 スイングバイ で 加 速 す る
◆ 2018 年 6~7 月 小 惑 星 J U 3 到 着 科 学 観 測 資 料 採 取

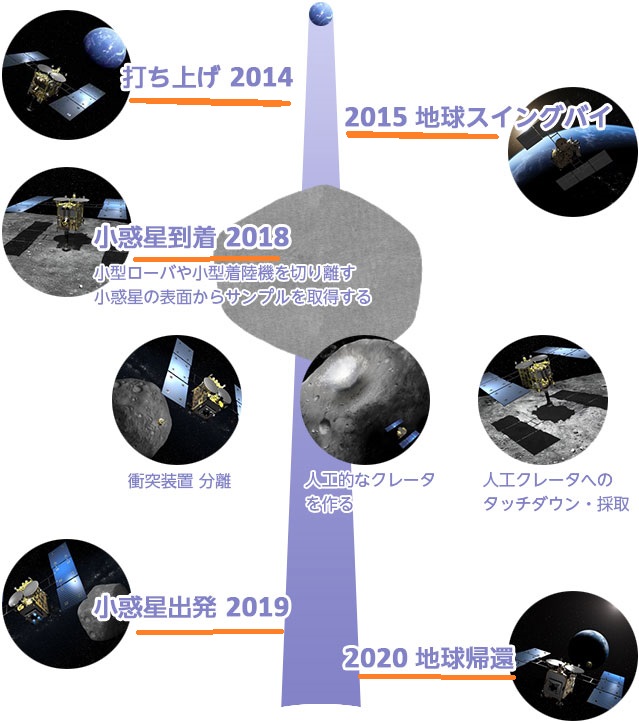
◆ 2019 年 11~12 月 小 惑 星 出 発
◆ 2020 年 11~12 月 地 球 帰 還 オーストラリア 砂 漠 東 京 オリンピック の 開 催


「 はやぶさ 」 ( 初 代 )
● 追 跡 の 仕 方 いろんな メディア 新 聞 テレビ Yahoo Google Youtube 等 よ り
「 はやぶさ 2 」 の その 時 点 の 状 況 を 拾 っ て 記 録 に 残 こしていきます
J a x a で は はやぶさ 2 カウントアップ レポート " L + ( エルプラス ) " 始 動
L + とは 発 射 日 よ り の 経 過 日 数 を 示 します L ( Launch 打ち上げ 発射 発進 開始 )
例 L 9 0 うちあげ 日 か ら 9 0 日 目 2015 年 3 月 3 日

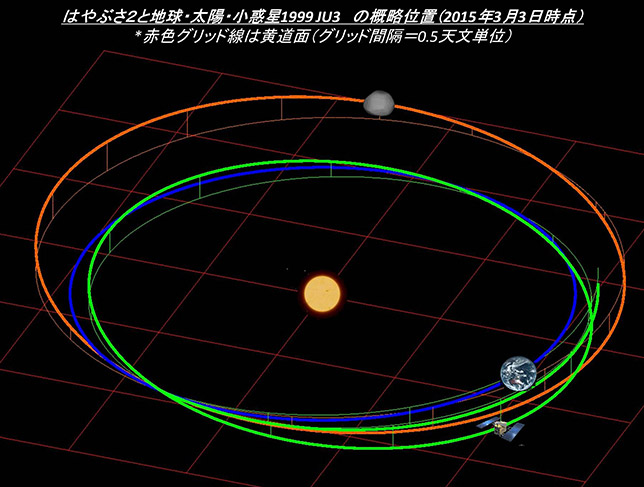
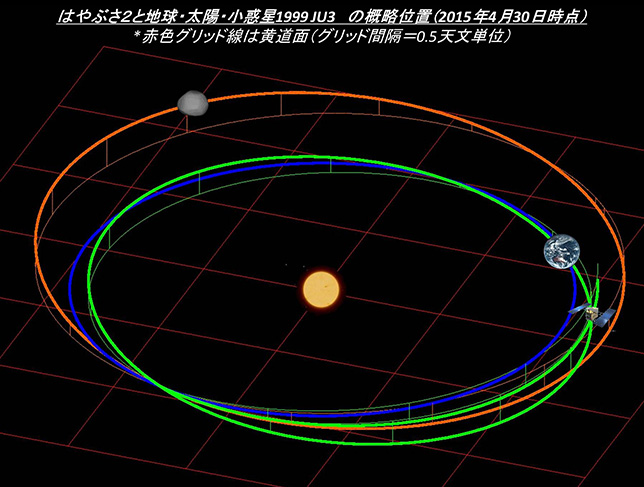
J a x a 特 設 サ イ ト 2015 年 3 月 3 日 現 在 の はやぶさ 2 の 位 置 関 係
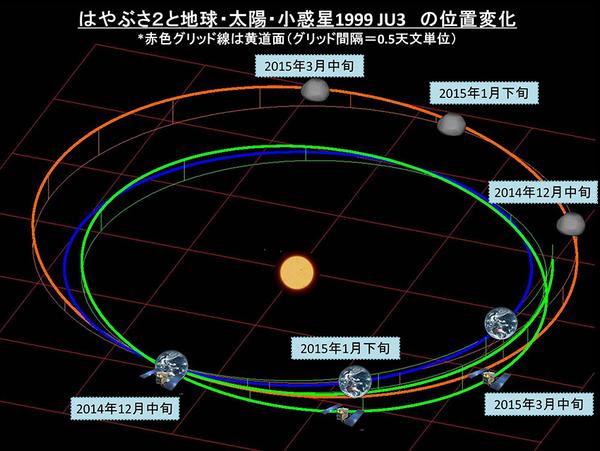
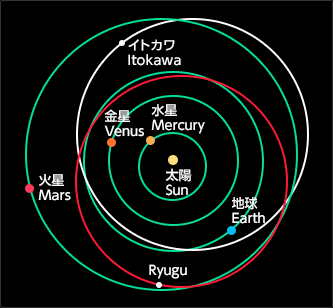
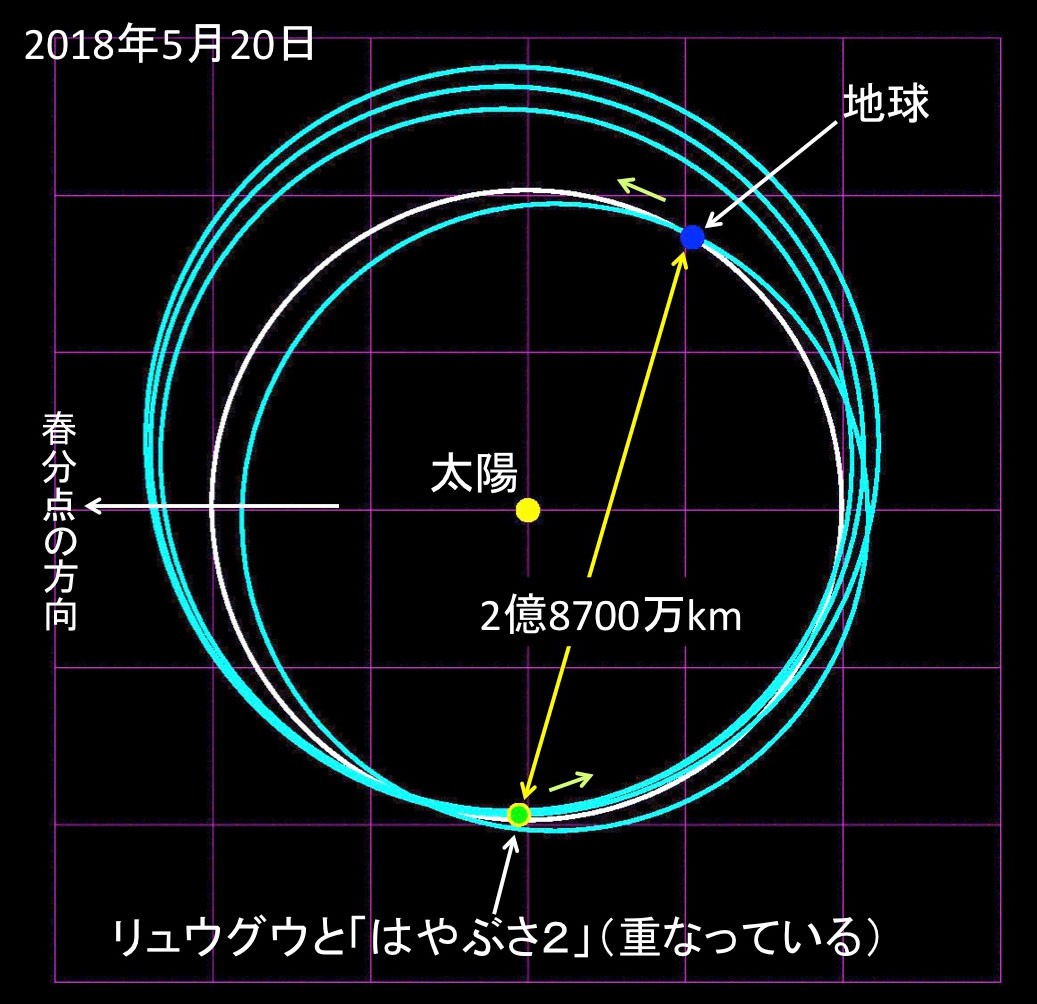
2015-3-13 時 点 右 画 像 「 はやぶさ 2 」 地 球 J U 3 太 陽 の 位 置 関 係
左 から 2014 12 月 中 旬 2015 1 月 下 旬 2015 3 月 中 旬 の 位 置 関係
発 射 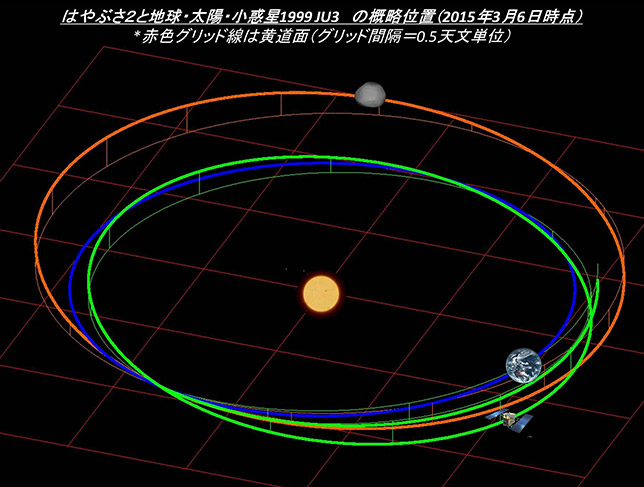
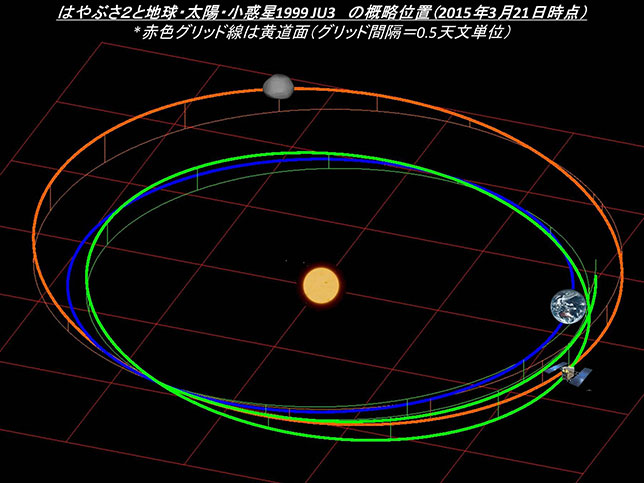
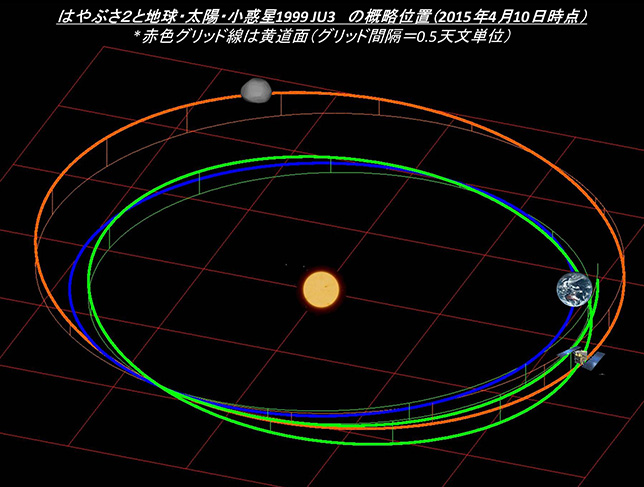
2015 3 3 2015 3 6 2015 3 21 2015
4 10


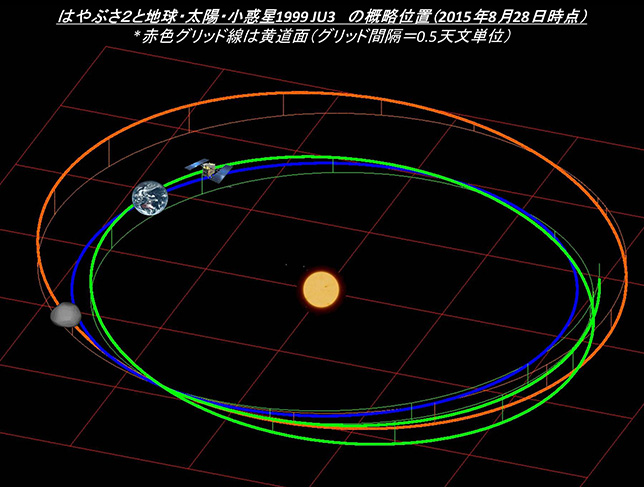
星 リュウグウ 探査 52 億 キロ の 旅 読 売 2015 11 3 Singby. 2015、8、28
TCM1のための高精度軌道測定
− カタツムリよりも遅いスピード変化も見逃さない −
11月3日に スイングバイ に向けた第一回軌道修正(TCM1)を実施して無事終了しました。
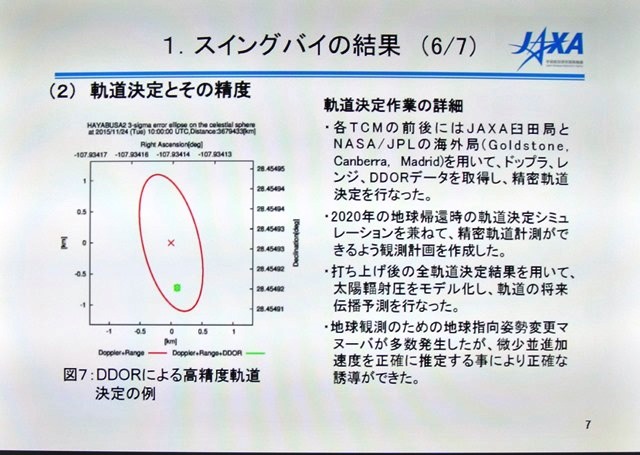
TCM1の前後には、JAXA 臼 田 64mアンテナ と NASA が保有する世界中のアンテナが協力して
「はやぶさ2」の軌道を測定し、修正すべき軌道のずれの量や軌道修正の実績などを精密に計算しました。
宇宙船の軌道測定にはいくつかの手法がありますが、最も基本的な手法が 「 ドップラー計測 」です。
向かってくる救急車のサイレンの音が高くなり、遠ざかると低くなるのと同じで、「はやぶさ2」から送信されている電波の周波数の高さ
(=電波の’音色’の高さ)を地上アンテナで正確に聞きとれば、「はやぶさ2」が地球に向かってきている速度を知ることができます。
また、地球は自転をしているので、「はやぶさ2」の電波を耳を澄まして良く聞くと、地球の自転と同期して電波の周波数が高くなったり
低くなったり繰り返している事が分かります。周波数の高さが最大・最小になるタイミングや、
周波数変動の高低の幅などを正確に測定すれば、「はやぶさ2」が空のどの方向を飛んでいるのかが分かります。
世界中の多くのアンテナが参加すれば、様々な場所やタイミングで‘音色’を聞き分ける事ができるので、
より正確に「はやぶさ2」の軌道を測定することができるのです。
軌道測定の手法には「ドップラー計測」の他にも、地上アンテナと宇宙船までの距離を正確に測定する「レンジ計測」や、
地球上で遠く離れた2台のアンテナで協力し、宇宙の超遠方で電波を放射している”電波銀河“と「はやぶさ2」の電波を交互に受信して、
銀河とはやぶさ2の間の天球面上の相対位置を測定する「Delta-DOR(Delta Differential One-way Ranging)計測」などの手法があります。
TCM1の少し前から地球スイングバイにかけて、これらの計測を世界中で毎日繰り返し、「はやぶさ2」を地球に向けて正確に誘導しているのです。
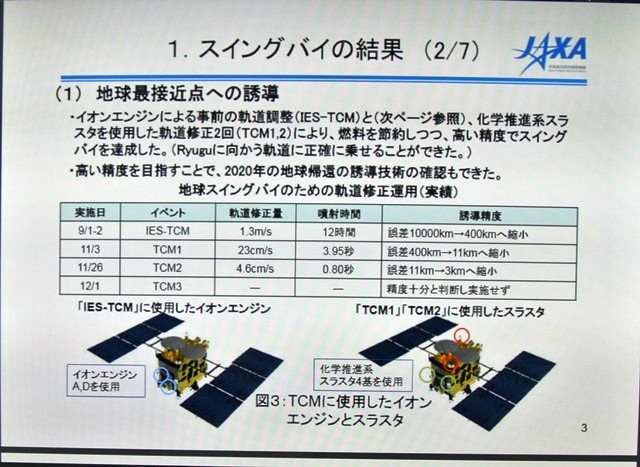
TCM実施時の速度制御量調整も、「ドップラー計測」を用いて行ないます。11月3日に行なわれたTCM1では、
なるべく高い精度で軌道制御を行なうために、計4回に分けてスラスタ噴射を行ないました。
スラスタ噴射時にリアルタイムで「ドップラー計測」を行うと、噴射前後の「はやぶさ2」の速度変化を0.1mm/sの精度で検出する事ができます。
最初の二回の噴射で検出された速度変化実績を、後の二回の噴射量に反映させる事により、非常に高い精度で TCMを実施する事ができました。
ちなみに、典型的な カタツムリ の速さは 1mm/s 程度(世界記録は2.75mm/s)だそうです。一千万キロ 以上離れた場所を進むカタツムリが、
歩みを緩めて一休みをしたとしても見逃さない程の驚異的な計測精度を持つ「ドップラー計測」が、「はやぶさ2」の順風満帆な航行を支えているのです。
TCMのためにいくら正確に軌道を計測しても、スラスタ噴射の量や方向を精密に制御できないと、目的の場所には誘導できません。このことに関しては、
推進系の専門の方にお話ししてもらいます。
はやぶさ2プロジェクト H.T.
2015.11.09 こ の 記 事 は はやぶさ 2 カウトアップレポート よ り コ ピー し ま し た
● 竜 宮 神 社 と 浦 島 神 社
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
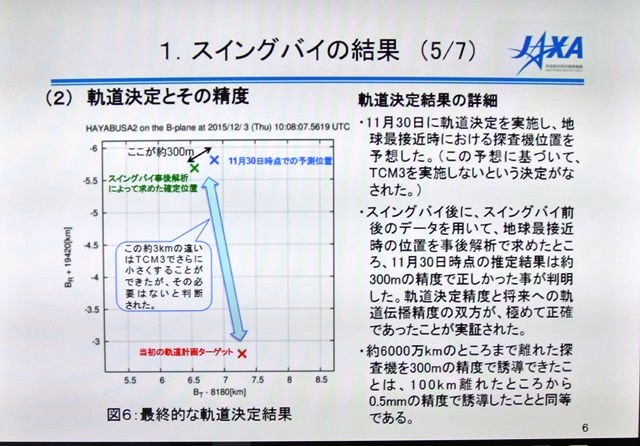
● 地 球 スイグバイ 2015-12-3 L - 365
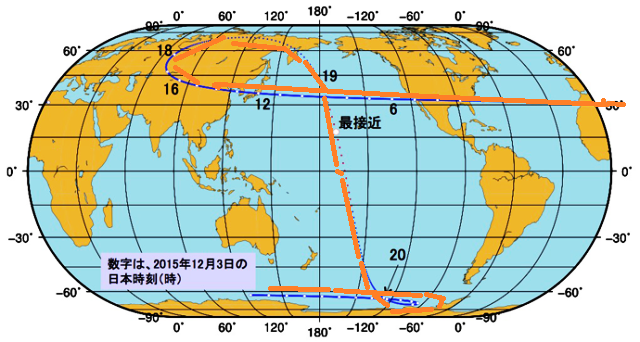
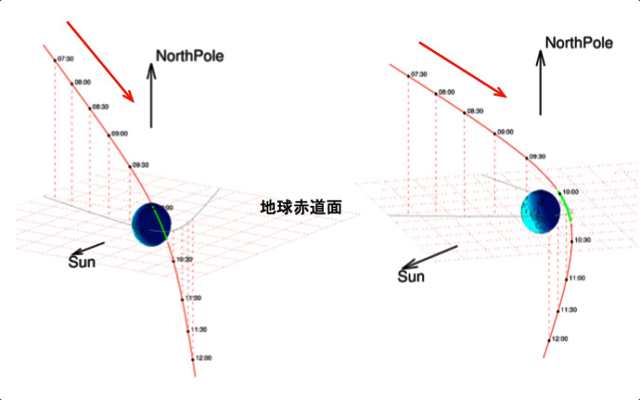
日 本 上 空 通 貨 2015.12.3 正 午 頃 距 離 14万 ㎞
地 球 最 接 近 ハワイ 上 空 2015.12.3 19 時 8 分 距 離 3090 ㎞
地 球 スイングバイ 無 事 完 了 小 惑 星 りゅうぐう の 軌 道 に 乗 っ て 追 跡 中 で す
りゅうぐう 到 着 は 2018 年
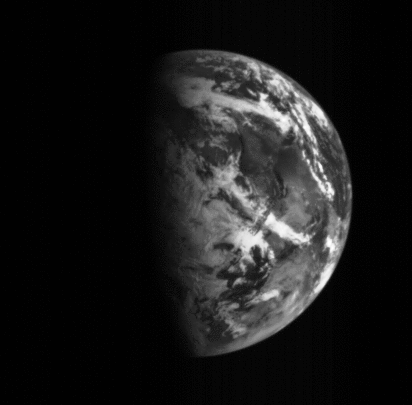
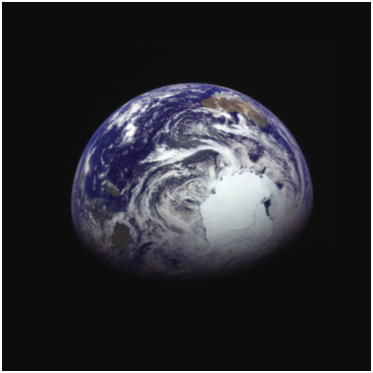
地 球 に 最接近する 直前 に、「 はやぶさ 2 」が搭載している光学航法カメラ で 地 球 を 撮 影 しました
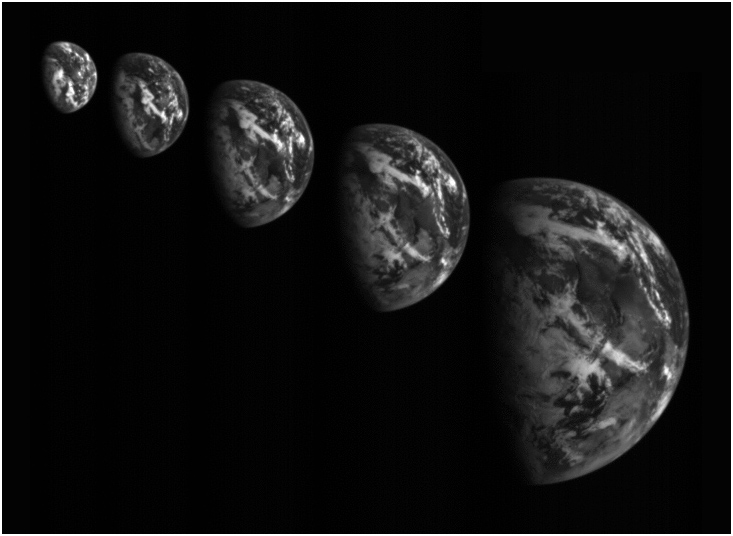
20 15 10 7.2 5.7 3.6 万 ㎞ アニメーション
3.6 万㎞ 模 擬 画 像 Flow of View Visualizer ソフト
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
2015 4 30
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
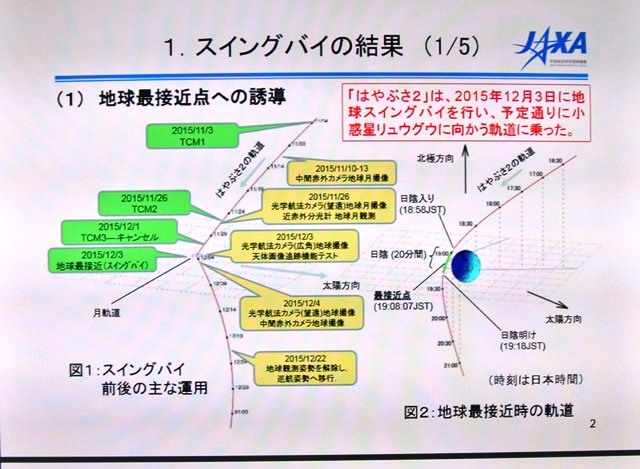
◆ 「 はやぶさ 2 」 は 、平成 27 (2015)年 12 月 3 日 (木) の 夕 方 から 夜 にかけて 地 球 スイングバイ を 実 施 し、
1 9 時 08 分 (日本時間) に 地 球 に 最 接 近、ハワイ 諸 島 付近 の 太平洋上空 約 ,090 km を 通 過 しました。
地 球 スイングバイ によって 軌 道 を 約 8 0°曲 げ、スピード は 秒 速 約 1.6 km 上 が っ て
秒 速 約 31.9 km ( 太陽 に 対する 速度 ) となり、目標 としていた 数 値 を 達 成 しました。
NASA 深宇宙 ネットワーク 局 、ESA ( 欧州宇宙機関 ) 深宇宙 ネットワーク 局 の 支 援 を 受けた 探査機 運用 により、
現 在 「 はやぶさ 2 」 の 状 態 は 正 常 であることを 確 認 しています。
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
Continue はやぶさ 2 カウトアップレポート よ り Copy して 追 加 していきます
三輪 次男 2015 年 4 月 2 日(木) 0 9 時 0 4 分 返 信
初 代 はやぶさ が、幾 多 の 難 関 を 乗 り越えて 奇 跡 的 、劇 的 に 無 事 サンプルリターン
を 果たした ことに 感 激 しました。
宇 宙 に 興 味 を 持ち 、宇 宙 に ロマン を 感じている ひとりです。
2020 年 は 東京 オリンピック 開 催、はやぶさ 2 帰 還、そして 私 の 米 寿 を 祝 う 年 です。
それまで はやぶさ 2 を 追 跡 するつもりです。 April smart
ファン § ファン § JAXA § “ L + 119 “ それぞれ の 役 割 が 目 指 す 先
2015 4 2 コメント覧 に 投 稿 したものを 保 存 しておきました
★ 「 はやぶさ 2 」 軌 道 シ ーケ ン ス 動 画 JAXA 特 設 サイト よ り
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
2015 12 30 追 加
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
● 【 はやぶさ 2 】 運 用 室 No 6 20169 1 7 Copy 追 記
2015 1 2. 3 地 球 スイングバイ 開 始 から 終 了 までの 運 用 状 況 説 明
詳 し く は こ ち ら

ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
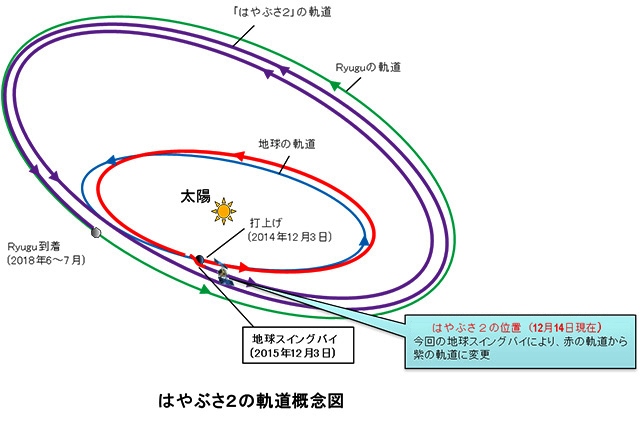
● 「 はやぶさ 2 」 ミッションロゴ の 色 が 変わり ました 2016年3月31日(木)
ロゴ haya 2 logo
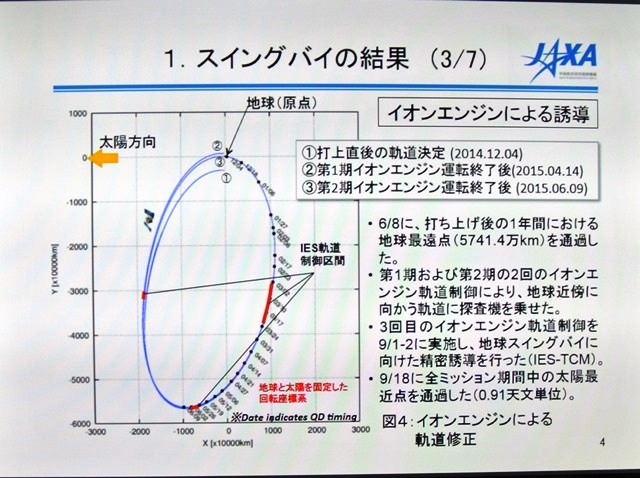
「 はやぶさ 2 」 は、地球 スイングバイ を終了して、小惑星 リュウグウ に向かう軌道に乗っています。
打ち上げ後 1年間 の EDVEGA (※1)フェーズ が終了し、Transfer(※2)フェーズ に 移行したわけです。
この節目に、これまでの ミッションロゴ の 色 を変えてみました(図)。描かれているイラストは変わりませんが、
小惑星の名称を仮符号 の 1999 JU3 から RYUGU としてあります。
青系統 にした理由ですが、「 はやぶさ 2 」 が、地球近傍軌道から離れて 太陽系空間を深く突き進むイメージを青系統に託しました。
また、浦島太郎 は、亀 に乗って 大海原 を 深く深く進んで 竜宮城 に行くわけですが、そのイメージからも青が似合うと考えました。
「 太陽系 」 という 大海原 を 航海 していく 「 はやぶさ 2 」 を、これからも応援してください。
-
 スイングバイまで
スイングバイまで  色を変更したロゴ(右)
色を変更したロゴ(右)
※1 EDVEGAとは、Electric Delta-V Earth Gravity Assistの頭文字を並べたもので、
電気推進(イオンエンジン)と地球スイングバイを組み合わせた探査機の軌道航法のことである。
「Electric Delta-V」がイオンエンジンによる加速のことを意味し、「Earth Gravity Assist」が地球スイングバイを意味している。
「はやぶさ2」の場合、打ち上げ後、最初の1年間がEDVEGAを行っていた期間になる。
※2 Transferとは遷移のことであり、地球軌道からリュウグウの軌道に移る間の軌道のことである
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
★ X 線 天 文 衛 星 『 ひ と み 』 アストロ H
はやぶさ 2 は 2018 年 夏 小 惑 星 りゅうぐう に 到 着 するまで 大 き な イベント は
ないので はやぶさ 2 追 跡 は 一 休 み して X 線 天 文 衛 星 ひ と み の
発 車 から 異 常 発 見 運 用 断 念 までの 概 要 を 挿 絵 的 に 載せて おきます
経 過
● X 線 天 文 衛 星 アストロ H 打ち上げ 2016 2 17


● 異 常 発 見 2016 3 26
● 運 用 断 念
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
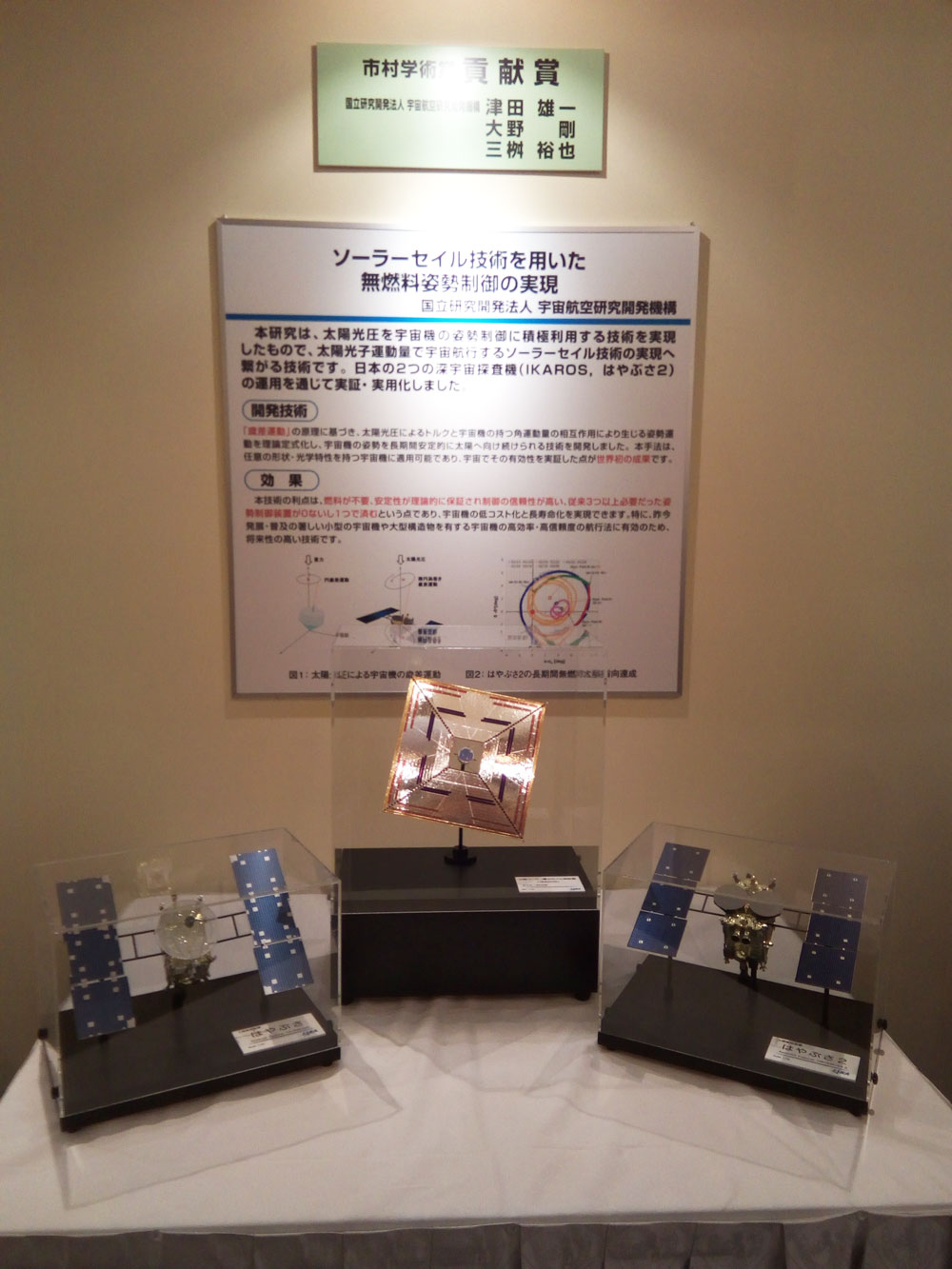
★ 第 5 0 回 市 村 賞 を 受 賞 【 はやぶさ 2 】 プロジェクト メンバー
第50回市村賞の市村学術賞・貢献賞を、「はやぶさ2」プロジェクトのメンバーである津田雄一プロジェクトマネージャ、
大野剛研究開発員、三桝裕也研究開発員が受賞しました。
受賞した研究テーマは「ソーラーセイル技術を用いた無燃料姿勢制御の実現」です。
市村賞とは、 公益財団法人市村清新技術財団が、産業分野や学術分野の発展・進展に貢献・功績のあった技術研究者・グループに贈呈している賞です。
市村産業賞と 市村学術賞がありますが、今回受賞しました市村学術賞とは、「大学ならびに研究機関で行われた研究のうち、学術分野の進展に貢献し、
実用化の可能性のある研究に功績のあった技術研究者またはグループに贈呈」されるものです。
津田プロジェクトマネージャらは、宇宙機の姿勢制御に太陽光の光子運動量(太陽光圧)を積極的に利用することにより、
燃料を使わずに宇宙機の姿勢制御を行う方法を実用化しました。
太陽光圧は、宇宙機の運用においては姿勢や軌道を乱すものなのですが、それをうまく利用することにより燃料の節約に結びつけたわけです。
この方法は、小型ソーラー電力セイル実証機「IKAROS」や小惑星探査機「はやぶさ2」の姿勢制御に実際に使われています。
授賞式は2018年4月16日に帝国ホテルにて行われました。
受賞内容: http://www.sgkz.or.jp/prize/science/50/document_05.html

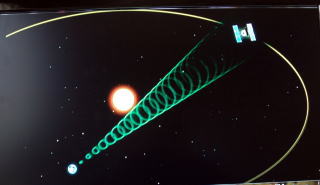
★ ソーラー セール
光 圧 推 進 に 関 し て
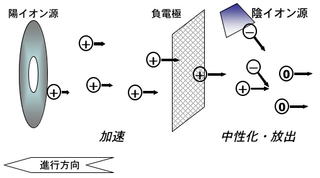
Ⅰ 原理
光の粒子が太陽帆を形成する薄膜に当たり反射すると2通りの現象が起こり得る、
1つは、光子が帆を構成する原子の周りの電磁波と衝突(弾性衝突)しをして跳ね返る光の反射、
もうひとつは、光子が帆に吸収され、帆が少し加熱される光の吸収で、光の運動量に着目すると、
光の吸収では、光子がもともともっていた運動量が帆に追加されるだけだが、
光の反射では、光子は向きが反転した運動量をもつことになるので、帆の側で考えると、
光子の2倍の運動量が追加されるので、こちらのほうが効率が良い。
(ここでは下の、Ⅰ 太陽光によって得られる推進力、の説明における反射率kが問題になってくる。)
Ⅰ 太陽光によって得られる推進力
ソーラーセイルは、太陽光の圧力を推進力にして宇宙を航行する。
光の圧力(光圧)は非常に小さなものであるが、
帆を大きく、軽くすることによって推進力として利用できる。
図1-1 はその原理を説明したもので、P0は光圧、θはセイルへの入射角及び反射角(この二つは等しくなる)、
S はセイルの面積、F は得られる推進力の大きさである。セイルの反射率が k (0≦k≦1) だとすると、
これらの関係は次式で表される。

ここで、αはセイルの法線と推進力方向間の角度である。したがって、推進力の大きさと向きは、セイルの反射率 k と太陽光の入射角θに依存することになる。
(光圧Fは余弦定理
 で、αは正弦定理
で、αは正弦定理
 で求められる。)
で求められる。)
次に、太陽光圧力 P0は、k1 を太陽放射定数、r を太陽からの距離、c を光速とすると、光圧は次式のようになる。

ここで、k1 = 3.85×1026[Nm/s]、c = 3.00×108[m/s] である。太陽と地球間の距離 re = 1.50×1011[m/s]より、地球付近の太陽光圧は、P0e = 4.57×10-6[N/m2] となる。
式(1-2)からわかるように、

であるので、地球付近では、

よって、ソーラーセイルの推力はセイル面積に比例するため、面積を増やしたときに質量がどれだけ増えるかが問題になる。言い換えれば、いくらセイル面積を増やし大きな推力を得ても、その分質量も増えるため加速度は変わらない、すなわち加速度は面積密度に依存するのである。
Ⅱ 面積密度
セイル材料の密度をρとし、その材料を厚さ t のセイルにしたとする。また、Msをセイルのみの質量、S をセイル面積だとすると、面積密度σは次のように表される。
運動方程式 Ma = F に 式(1-1)を代入して θ= 0 に固定すると次式が得られる。

ここで、セイル以外の質量がセイル質量に比べて非常に小さくセイル質量が全質量と見なせるならば、M = Ms だから、上の2式より、
となり、上式にはセイル面積 S が含まれず、加速度がセイル面積に依存しないことを示している。面積密度が分母にあることより、面積密度が小さいほど加速度が大きくなり有利であることがわかる。
Ⅱ 実用化と現状
実際に宇宙船の推力源として太陽帆を利用するためには、極めて軽量かつ極めて広い面積を保持できる薄膜鏡が必要であり、初期にはアルミニウムの薄膜などが太陽帆の素材として候補になっていたが、あまりにも強度が不足しており、特に巨大な帆を宇宙空間で広げる際に帆を壊さずに広げる技術の開発が難しかった。しかし近年になって炭素繊維など素材の研究開発が進み、太陽帆に使用可能な薄膜の生成に実現性が帯びてきた。
太陽帆の研究は、アメリカ航空宇宙局 (NASA) を始めとして、世界各国で行われている。アメリカ惑星協会は2001年と2005年に太陽帆式宇宙船「コスモス1」の試作機を打ち上げたが、いずれも打ち上げ用ロケットのトラブルで衛星軌道に乗れず失敗した。三度目の打ち上げは2007年に予定されている。
日本では、宇宙航空研究開発機構 (JAXA)の宇宙科学研究本部により研究が行われている。2004年8月には太陽帆実現を目的とした、直径10m、厚さ7.5μmのポリイミドフィルム製の大型薄膜の宇宙空間での展開実験に成功している(下参照)。
参照
http://www.aero.kyushu-u.ac.jp/solar_sail/solar_sail.html#riron
http://ja.wikipedia.org/wiki/%E5%A4%AA%E9%99%BD%E5%B8%86
http://www.isas.ac.jp/j/snews/2004/0809_s31034.shtml
◆ 宇 宙 ヨ ツ ト Jaxa
◆
★ 2018 6 4 読 売 新 聞
1.jpeg)
★ オシリス . レツクス
小 惑 星 ヘ ゙ ンヌ 探 査 機
オシリス・レックス(英語: Origins, Spectral Interpretation, Resource Identification,
Security, Regolith Explorer、OSIRIS REx)はアメリカ航空宇宙局ゴダード宇宙飛行センター(NASA/GSFC)が
アリゾナ大学月惑星研究所などと共同開発している ベンヌ からのサンプルリターンを目的とした宇宙探査機である。
日本語では「オサイレス・レックス」「オサイリス・レックス」とも表記され、「アメリカ版はやぶさ」と呼ばれることもある[5]。
ニュー・フロンティア計画の3番目のミッションであり、2016年9月に打ち上げが成功した。
ベンヌ 到達 は 2018 年、地球への帰還は 2023 年 の 予定。
オシリス . レツクス Youtube 動 画
★ ベ ン ヌ Yahoo Wikipedia
ベンヌ (小惑星)
出典: フリー百科事典『ウィキペディア(Wikipedia)』
Jump to navigationJump to search
概 要 [編集]
2009年にアンドレア・ミラニと共同研究者が報告した力学的研究によると、
ベンヌは2169年から2199年までの間に8回地球に接近し、そのどれかで衝突する可能性があることがわかった。
この小惑星を構成する物質が何であるかはほとんどわかっておらず、衝突の可能性もそれに左右されるが、
衝突の確率は8回の可能性の合計でも最大0.07%であるという[6]。
ベンヌが地球に衝突する可能性をさらに精密に計算するには、この小惑星の形状をより正確に把握し、
少なくとも複数年に及ぶレーダー観測と光学観測を続行してヤルコフスキー効果による影響が
どの程度かを見極める必要がある。
地球からの探査機打ち上げ時に大きな加速 (Delta-V) を必要としないことから、
ベンヌはオシリス・レックスを含む天体調査ミッションの調査対象として何度も候補になってきた。
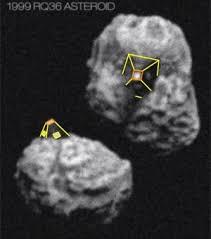
2012年9月4日、NASAはオシリス・レックス計画でサンプルリターンミッションが予定されている、
当時は (101955) 1999 RQ36と仮符号で呼ばれていたこの小惑星に付ける名前を全世界の18歳未満から
募集すると発表した[7]。締め切りは当初同年12月2日までの予定であったが、12月31日に延長された。
そして2013年5月1日に、エジプト神話の不死鳥にちなんでベンヌ (Bennu) と命名したことを発表した[8]。
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
J a x a レポート
★
は や ぶ さ 2 竜 宮 接 近 np - 44
 ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
★
220 km ~ 100 km の 距 離 か ら 見 た リ ュ ウ グ ウ
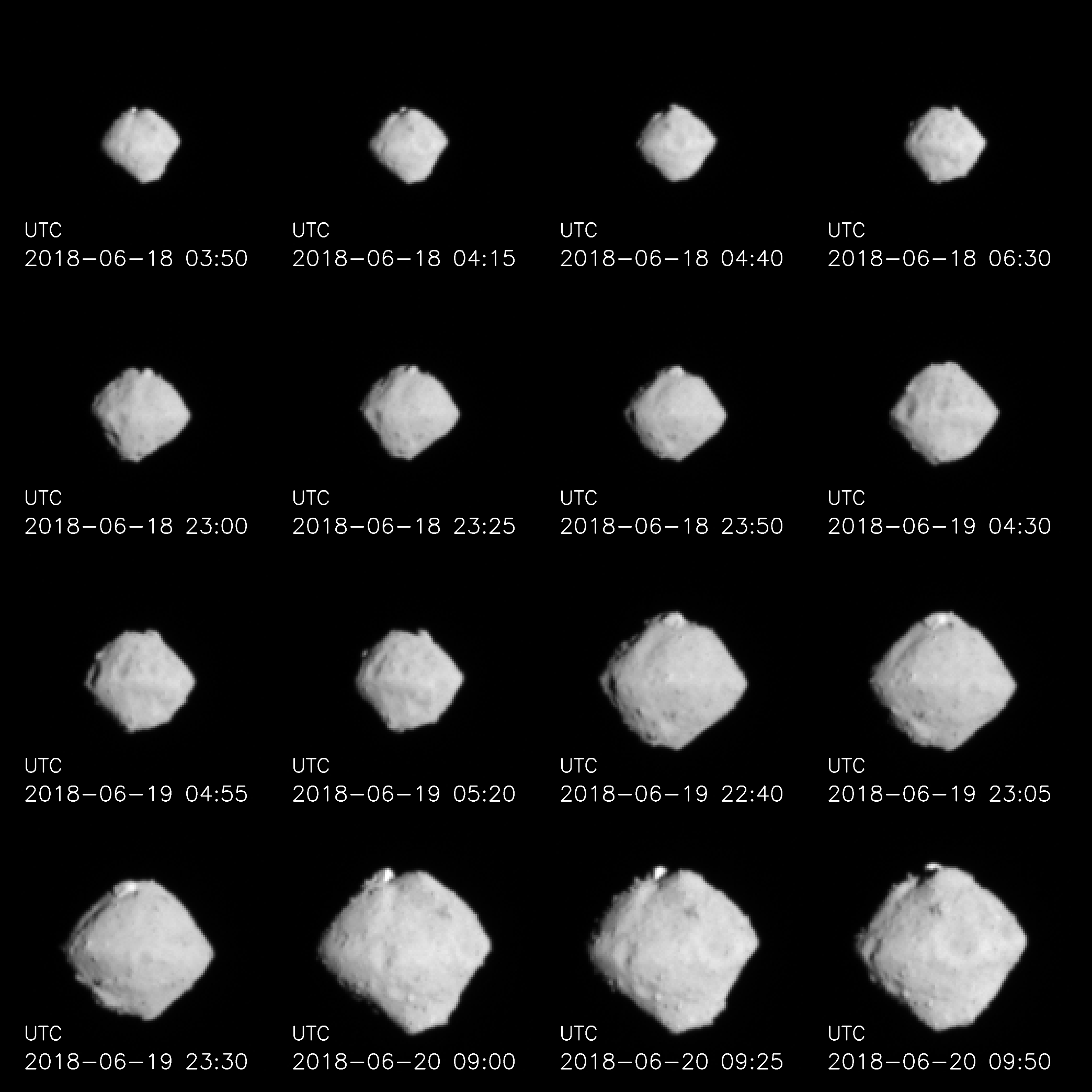
 イギリス の 天文学者 が リュウグウ の 画 像 処 理 したもの
イギリス の 天文学者 が リュウグウ の 画 像 処 理 したもの
ブライアン・メイ
出典: フリー百科事典『ウィキペディア(Wikipedia)』
Jump to navigationJump to search
 JAXA
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
JAXA
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
★
は や ぶ さ 2 竜 宮 に 到 着

の
 ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
★
は や ぶ さ 2 ロ ゴ
「はやぶさ2」の ロゴマーク が更新されました。
真ん中に描かれている 「はやぶさ2」 の絵、及び周辺の天体のイラストは変わっていませんが、
一目みてわかるのは、イラストが従来の オレンジ 基調から 青 (水色) 基調に変わったということです
青系統にした理由ですが、「はやぶさ2」が、地球近傍軌道から離れて太陽系空間を
深く突き進むイメージを 青 系 統 に託しました。
また、浦島太郎 は、亀に乗って 大海原 を深く深く進んで 竜 宮 城 に行くわけですが、
そのイメージからも 青 が似合うと考えました
リュウグウ 到 着 時 色 変 更 2018 6 27
 ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
★ は や ぶ さ 2 プロジェクト ] リュウグウ の
形 状 モ デ ル 初 期 バージョン が 完 成 を 掲 載 し ま した
2018 年 7 月 11 日 ( 水 )
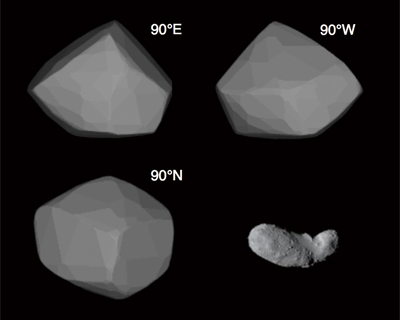
小惑星 リュウグウの全体像 をご紹介しましたが、「はやぶさ2」 プロジェクトの 形状モデルチームでは、
ONC-T (望遠の光学航法カメラ) で撮影した 画像 などをもとに、リュウグウの 三次元形状を計測 して、
形状モデル を作成する作業を進めています。
リュウグウの形状は、この小惑星の成り立ちを考える上で基本的な情報の一つであるとともに、
今後の 探査機 の運用のためにも重要です。
形状モデルチームでは、まず、探査機のリュウグウ 到着までの間に撮影された画像を用いて、
最初のリュウグウの 三次元形状モデル の作成を行いました。
この形状モデルデータを使い、 コンピュータグラフィックス で自転するリュウグウの 姿 を動画にしましたものが 図1、図2です
図 1
会 津 大 に よる リュウグウ の 形 状 モデル。
画 像 クレジット ※ 1 : 会津大 , 神戸大 ( 形状モデル 作 成 ), Auburn University ( 動画作成 ), JAXA
図 2
神 戸 大 によ る リュウグウ の 形 状 モデル。
( 注 : 画 像 が 左右 反 転 になっていたものを 修 正 しました。 2018.07.11 )
画 像 クレジット ※ 2 : 神戸大, 会津大 ( 形状 モデル 作成 ), Auburn University( 動 画 作成 ), JAXA
これから 更に 鮮 明 な 画 像 を 見 る ことが できることでしょう
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
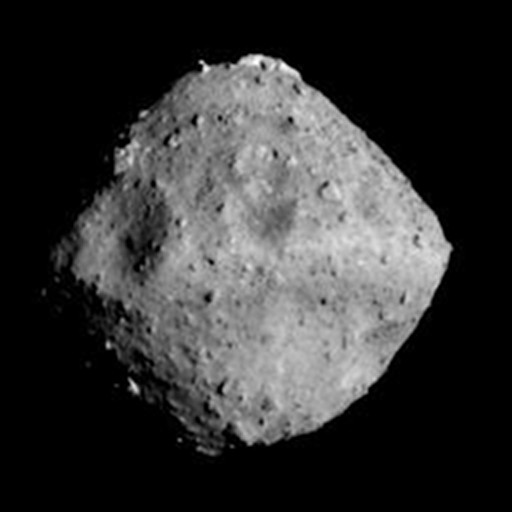
★ 高 度 6 km か ら 撮 影 し た リ ュ ウ グ ウ
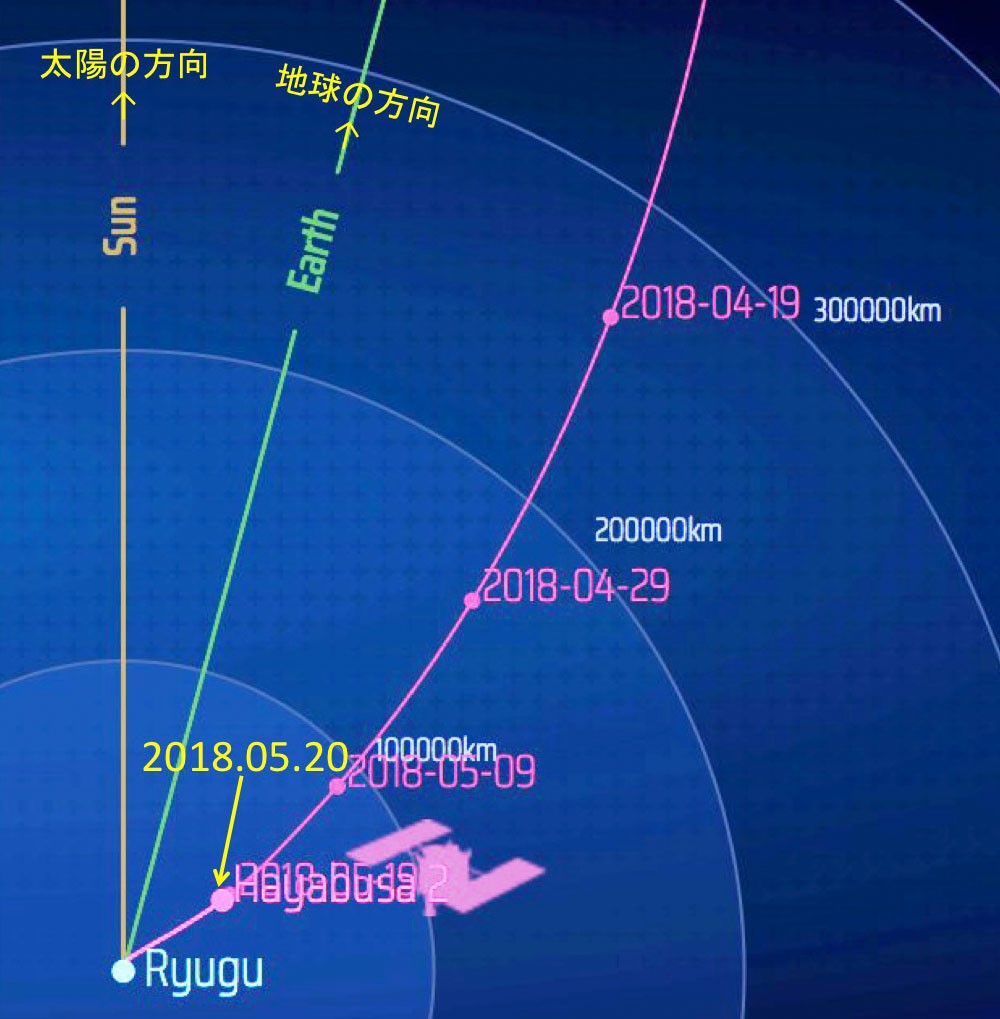
「はやぶさ2」は、6月27日に小惑星リュウグウ(Ryugu)に到着しましたが、その後、小惑星から 約 20 km 離れた 地点に滞在して、
リュウグウ の 観 測 を続けていました。高度 20 kmで ホバリング をしていたわけです。
そして、7月16日の週には、このホバリングの 高 度 を下げるという 運用を行いました。
最終的には、高度が 6 km を切るくらいまで下がりました。そのときに撮影した 画 像 の1枚が 図1 です
かなり 鮮 明 に 見 え ま す
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
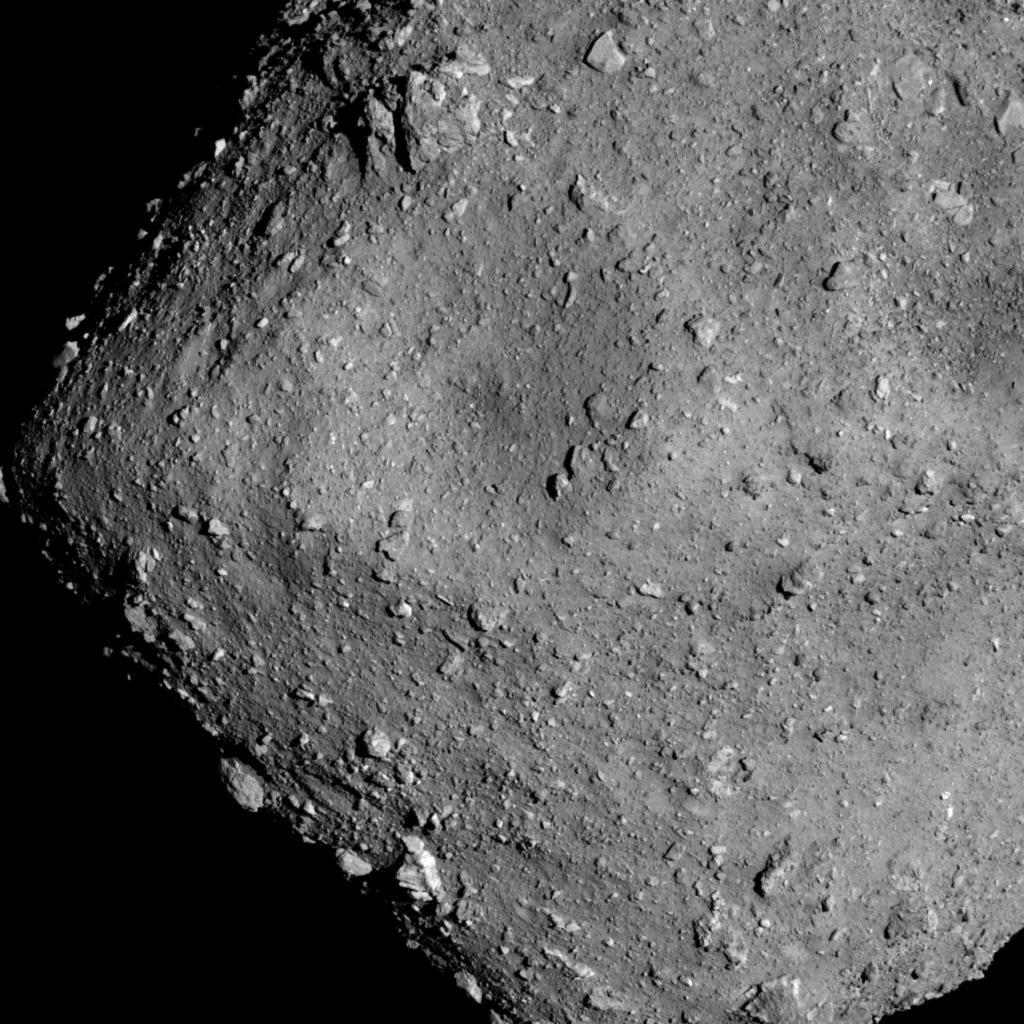
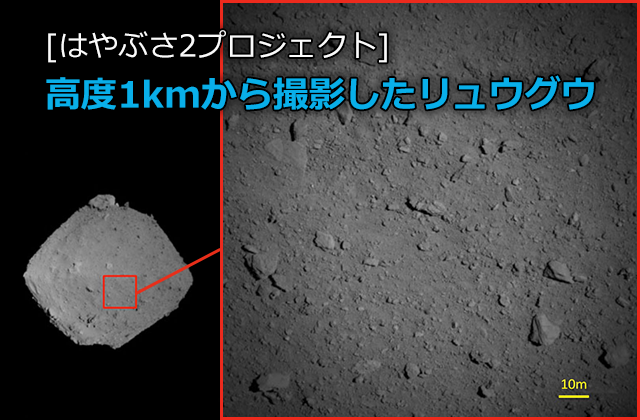
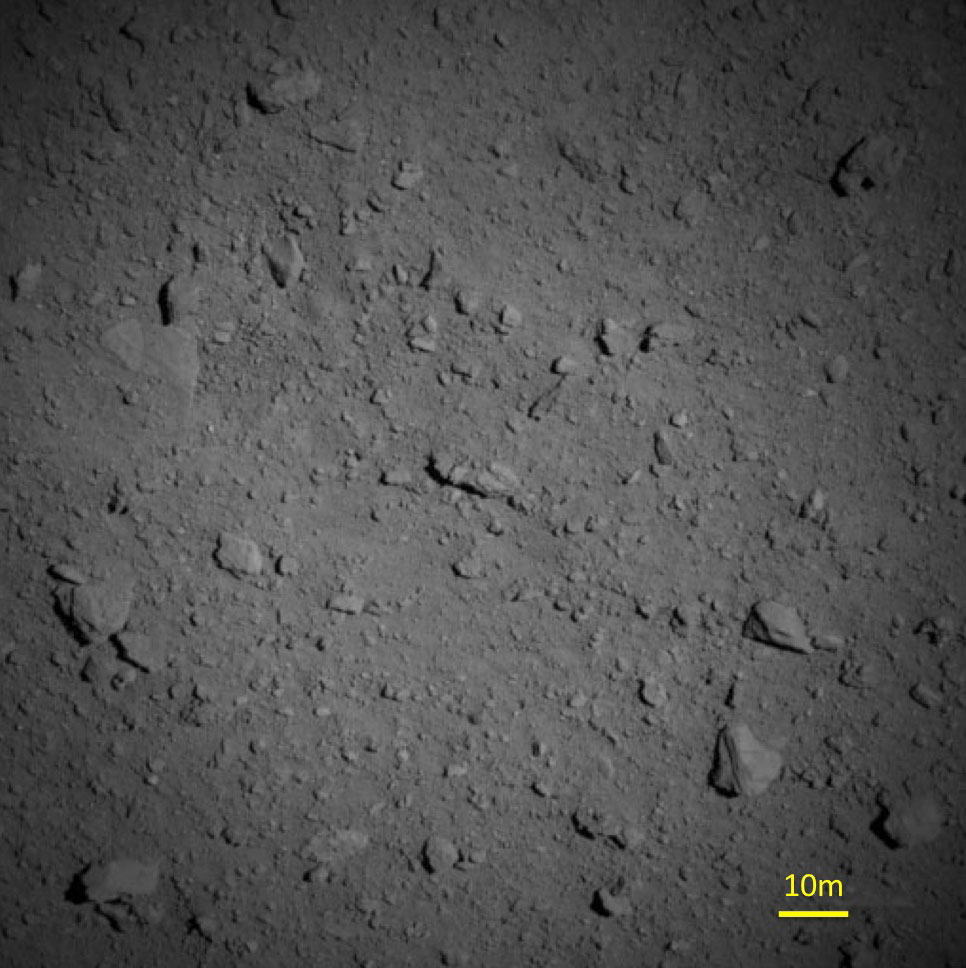
★ 高 度 1 km か ら 撮 影 し た リ ュ ウ グ ウ
6月27日 にリュウグウ に 到 着 してから、7月20-21日にはBOX-C運用として 高度 6km くらいまで降下しましたし、
8月1日 には 高度 5km ほどの中高度運用を行いました。そして、8月6日からは、リュウグウの重力を計測するために、
3回目の降下運用を行いました。
重力計測 運用 では、なるべく 探査機 の 軌道 ・ 姿勢制御 をせずにリュウグウの 引力 にまかせて探査機を運動させることを行います
(自由落下、自由上昇)。そのようにしておいて探査機の運動を正確に把握すると、
リュウグウからどのくらいの 強さ の 引 力 を受けているのかが分かるのです。
探査機は、8月6日の11:00前(日本時間)にホームポジション(リュウグウからの距離が20km)から降下を開始しました。
同日の20:30くらいには高度6000mに達し、そこから自由落下状態となりました。
そして、8月7日の8:10頃に最低高度となる851mまで接近し、そこでスラスタを噴いて上昇に転じました。
最低高度に達する直前に望遠の光学航法カメラ(ONC-T)で撮影した画像を図1と図2に示します。
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
★ こ ち は や 漫 画

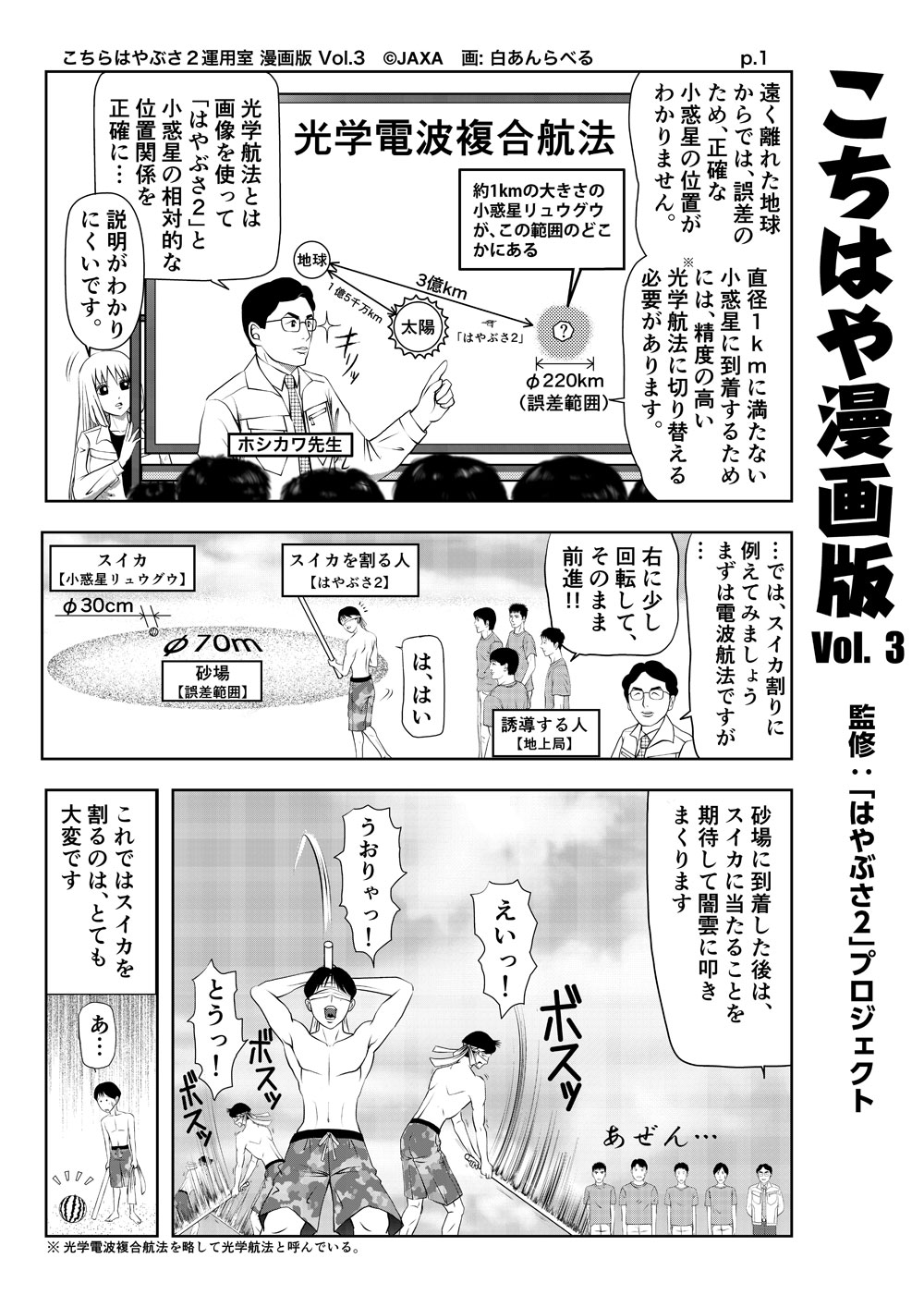
全 部 見 る に は こ ち ら を ク リ ツ ク
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
★ 小 型 探 査 ロ ー バ MINERVA 2018 9 19
トピックス 小型探査ローバ MINERVA-II1
「 MINERVA-II (MIcro Nano Experimental Robot Vehicle for Asteroid [the
Second Generation ] ) 」 は
初代「はやぶさ」に搭載された探査ローバ「MINERVA」の後継機です。
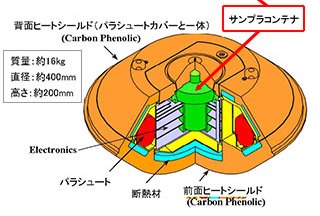
「 はやぶさ 2 」 の 底 面 には 「 MINERVA-I I1 」 および 「MINERVA-I I2 」 の 2 つの コンテナが
搭 載 されていて、
「I I1」 には 2 機、「 I I2」 には 1 機 の ローバ が 格 納 されています( 図 1 )。
9 月 に 分 離 が おこなわれるのは 「 MINERVA-I I1 」 の 方 です ( 「MINERVA-I I2 」 の 分 離
は 来 年 に 予 定 されています
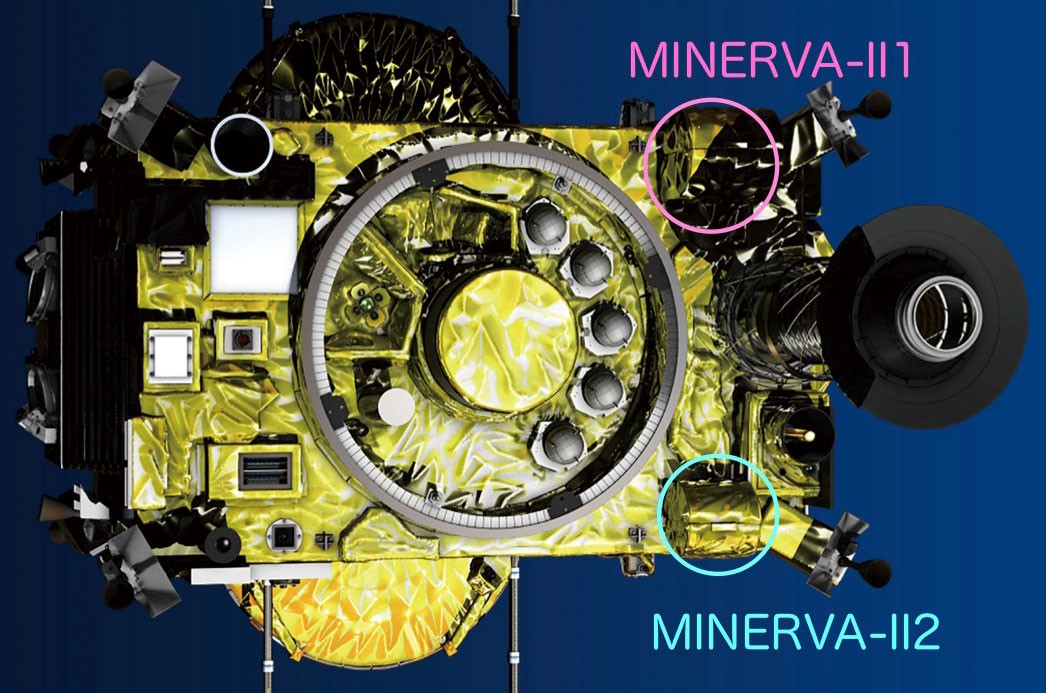
- 図1 「 はやぶさ 2 」 探 査 機 の 底 面。( 画 像 クレジット : JAXA)
「 MINERVA-I I1」 の 2 機 の ローバ ( Rover-1A, 1B ) は 直 径 18cm、高 さ 7cm の 正十六角柱 の 形で、重量 は ともに 約 1.1kg です(図2)。
開発 は JAXA 宇宙科学研究所 で行われ、以下の メーカ・大学・団体 からも 協力 をいただきました。
<協力メーカ、大学、団体など>
愛知工科大学、会津大学、アドニクス、アンテナ技研、エルナー、セシアテクノ、東京大学、東京電機大学、
デジタルスパイス、日東光学、マクソンジャパン、DLR, ZARM
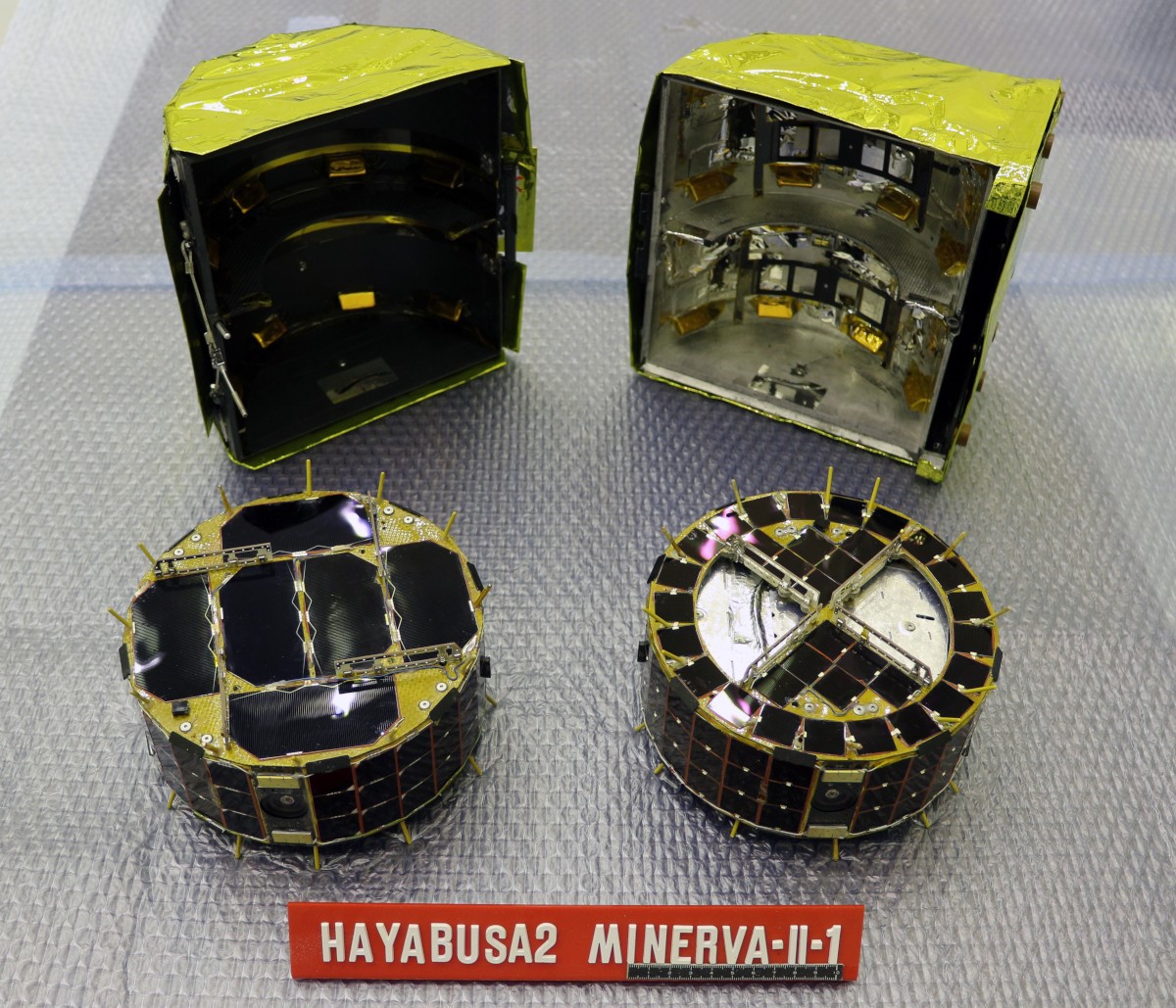
- 図 2 小型ローバ「MINERVA-II1」。左 が Rover-1A, 右 が Rover-1B。奥 は ローバを格納するカバー。
-
- (画像クレジット:JAXA)
-
Rover-1A には 4台、Rover-1B には 3台 の カメラが搭載されていて、リュウグウ表面のステレオ画像を撮影する予定になっています
。機体の縁から トゲ のように飛び出している一部は温度センサで、リュウグウの表面温度を測定します。この他、光センサ、
加速度計、ジャイロなどが搭載されています。
ローバは「はやぶさ2」に搭載されている中継器 (OME-E) を使って「はやぶさ2」と通信をおこないます。
この通信速度は最大で32k bpsです。そして、「はやぶさ2」から地球へとデータが送られます。
OME-Eは、10月に分離が予定されているドイツ・フランスの小型ローバ「MASCOT」の通信にも使われます。
MINERVA-II1の最大の特徴は、ホッピング機構によってリュウグウの表面を移動できる点です(図3)。
機体の内部にモータが内蔵されていて、このモータを回転させると反動で機体そのものがホップする
(飛び跳ねる)しくみになっています。これによってリュウグウの表面を移動し、複数の地点を探査することができます。
リュウグウ上では、MINERVA-II1は自律的に動きます。つまり、自分自身で状況を判断しながら探査を行うことになります
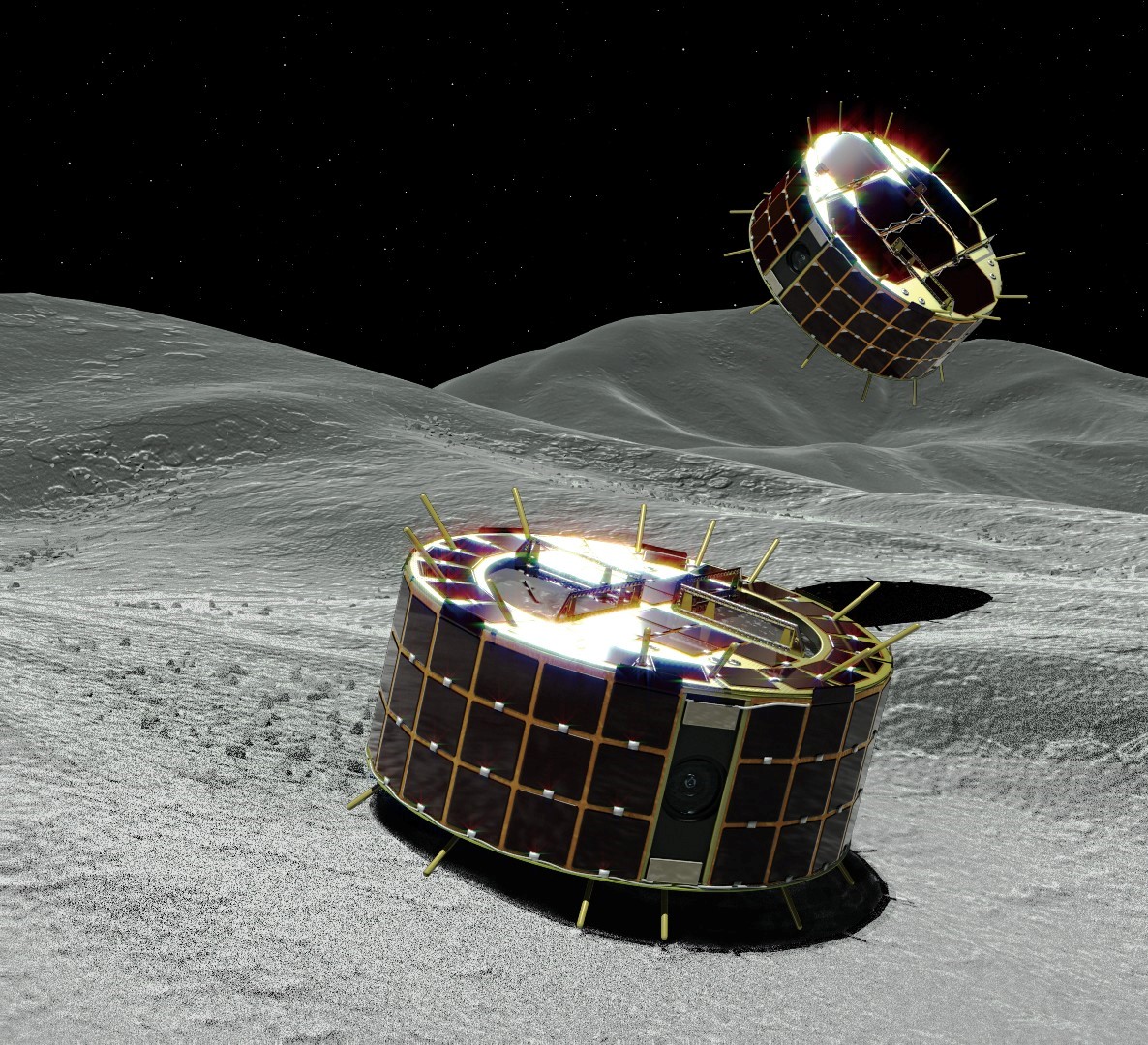
- 図 3 リュウグウ 表 面 の 探 査 を 行う MINERVA-II1 の Rover-1A(奥)およびRover-1B(手前)のイラスト。
(画像クレジット: JAXA)
リュウグウ 表 面 の 重 力 は 非常に 小さいため、通常の車輪やクローラなどでは、動き出した途端に機体が浮き上がってしまいます。
そこで、こうしたホッピング機構で移動する方法が採用されました。1 回 のホップで空中に飛び上がってから着地するまでに
最大 15 分間 ほど滞空し、水平方向に最大 15m ほど移動できる見込みです。
はやぶさ 2 プロジェクト 2018.09.19
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★ トピックス ミネルバ Ⅱ 1 、 写 真 撮 影・ リュウグウ
着 地 ・ ホップ に よ る 移 動 に 成 功 ! 2018 9 21
9 月 21 日 に、「はやぶさ2」 探 査 機 から 小 型 ローバ MINERVA-Ⅱ1 ( ミネルバ・ツー・ワン ) を 分 離 しました
( 分 離 時刻 は 日本時間 で 13:06)。 MINERVA-Ⅱ1 は Rover-1A と Rover-1B の 2 機 からなっていますが、
2 機 とも 小 惑 星 リュウグウ 表 面 に 着 地 したことを 確 認 しました。各 ローバ とも 状 態 は 正 常 で、撮
影 した 写 真 や
各 種 の データ を送って きています。その 写 真 等 の 解 析 で、 ローバ は リュウグウ 表 面 を 移 動 していることも
確 認 できました。
MINERVA-Ⅱ1 は、小 惑 星 表 面 に 降 り た 世 界 初 の ローバ ( 移 動 探 査 ロ ボット ) で す。また、
小 惑 星 表 面 で 自 律 的 に 移 動 したこと、写 真 撮 影 をしたことも 世 界 初 です。つまり、MINERVA-Ⅱ1は、
「 小 惑 星 表 面 で 移 動 探 査 をした 世 界 初 の 人 工 物 」となりました。しかも、2 機 同 時 に 動 作 させるという 快 挙 ともなりました。
以下に、MINERVA-Ⅱ1 から 送られて きた 写 真 を 示 します
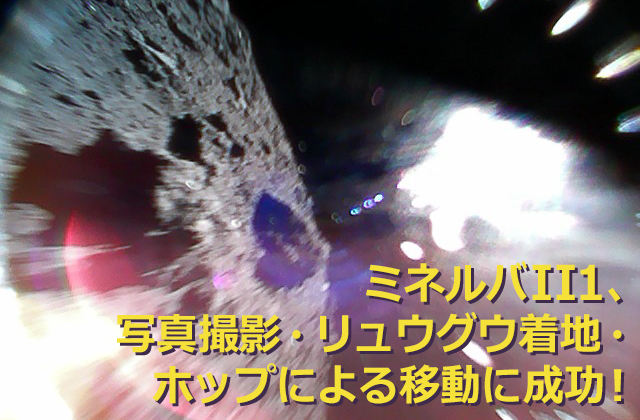

図 1 2018 年 9 月 2 1 日、13:08 ( 日本時間 ) 頃 に Rover-1Aが 撮 影 。カラー 画 像。探 査 機 から
分 離 直 後 に、
「 はやぶさ 2 」 探 査 機 (上) と リュウグウ 表 面 (下) を 撮 影 した。 ローバ が 回 転 している 状 態
で 撮 影 しているので画像がぶれている。
( 画 像 の クレジット : JAXA )

図 2 2018 年 9 月 21 日、13:07 (日本時間) 頃 に Rover-1B が 撮 影。カラー 画 像。探 査 機 から 分
離 直 後 に 撮 影 されたもの。
右下 に リュウグウ 表 面 が 映っている。左上 の 薄 く モヤ が かかっている 部 分 は 撮 影 時 の 太 陽 光
の 写 り 込みによるものである。
( 画 像 の クレジット:JAXA )

- 図 3 2018 年 9 月 22 日、11:44 ( 日本時間 ) 頃 に Rover-1A が 撮 影。カラー 画 像。
-
- リュウグウ 表 面 において 移 動 中 ( ホップ 中 ) に 撮 影 されたもの。
-
- 左側 半分 が リュウグウ の 表 面。右側 の 白 い 部 分 は 太 陽 光 によるもの。
( 画 像 の クレジット : JAXA )
MINERVA-Ⅱ1 の カメラ は カラー で 撮 影 することができます。
図 1 では 、ローバ が 回 転 しているために 画 像 がぶれていますが、
はやぶさ 2 」 本 体 と 太 陽 電 池 の パドル が はっきり と 分かります。
パドル は 青 っ ぽ く 撮 影 されています。
図 3 では、表 面 を ホップ している 最 中 に 撮 影 されたもので、ダイナミックな 動 き が 感 じ られます。
MINERVA-Ⅱ1 の 運 用 は 今 後 も 継 続 します。さらに データ を 取 得して、解 析 を進めて 行く予定です
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
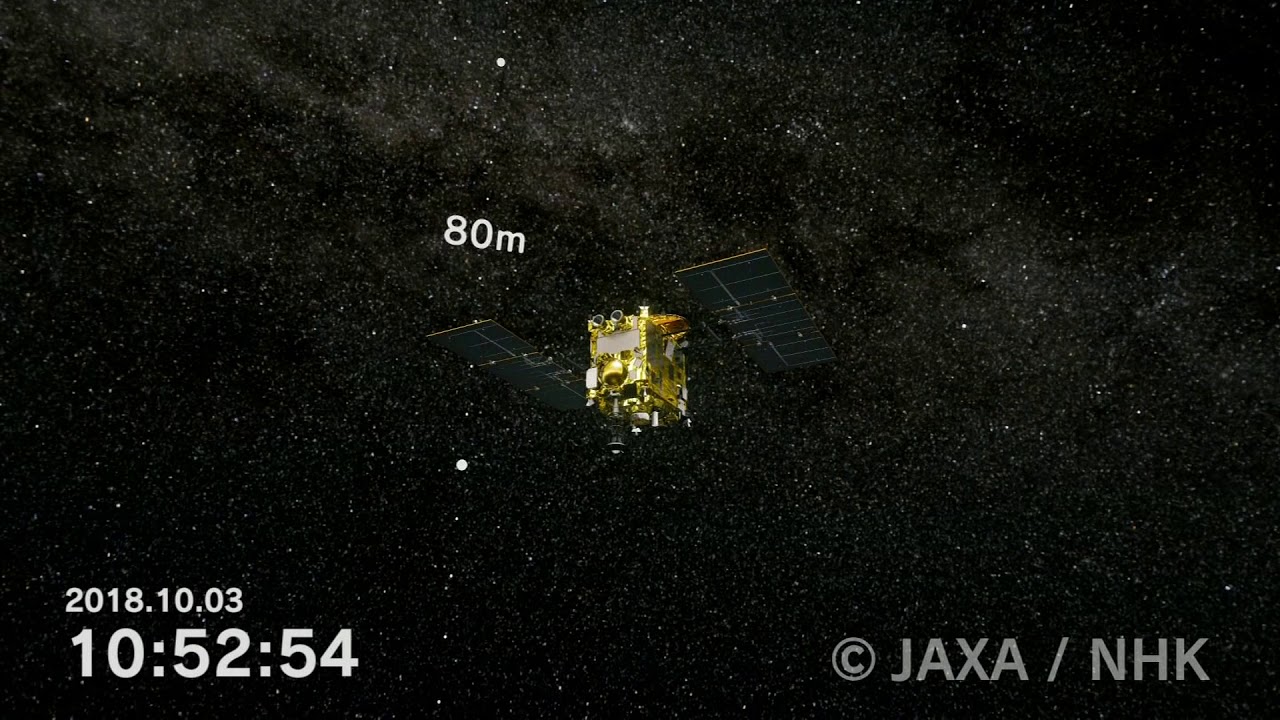
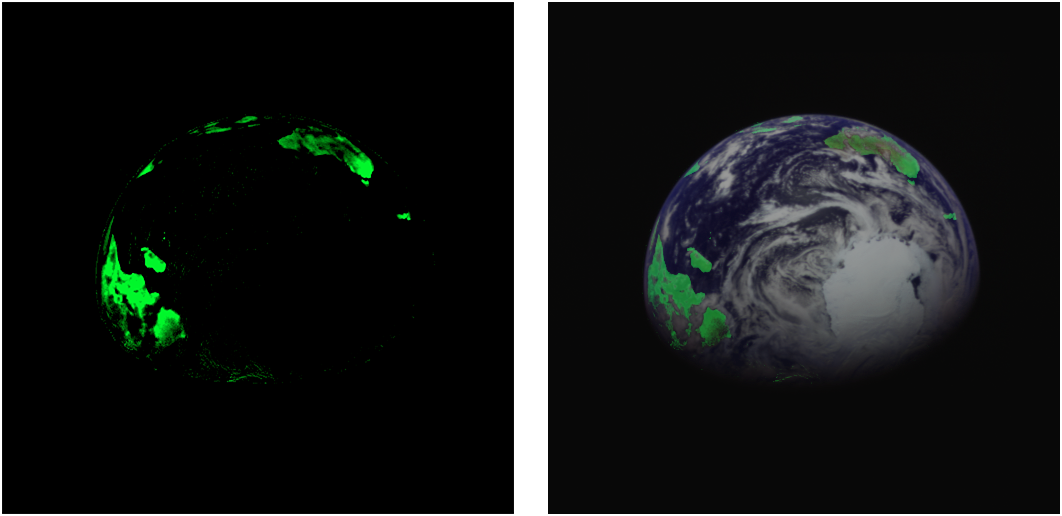
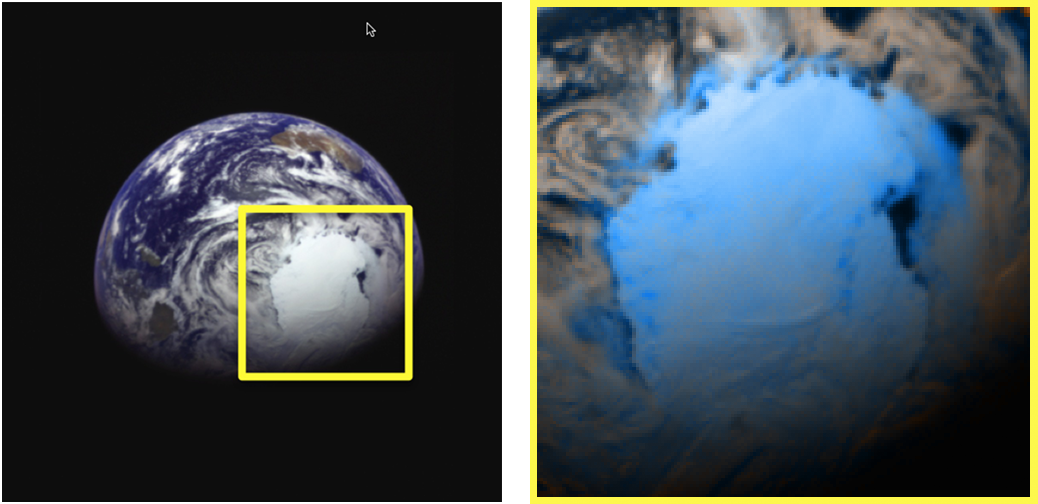
★ は や ぶ さ 2 可 視 化 システム J axa / N H K 2018 10 3
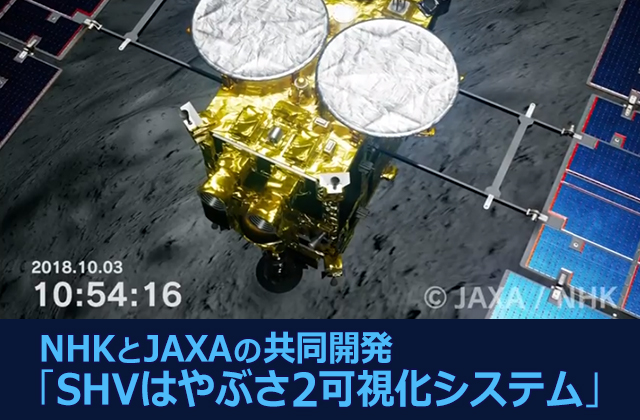
日本放送協会 ( N H K) と JAXA は、小惑星探査機 「 はやぶさ 2 」 の 挙 動 を
スーパーハイビジョン で 映 像 化 する 共同研究 を 進めています。
共同研究 の 目 的 は、探査機 の 挙 動 を 可 視 化 することにより、将 来 的 に、
探 査 機 の 運 用 に 役立てること を 目 指 しています。
J
AXA が 公 開 している、「 はやぶさ 2 」 からの 画 像 データ などを 用 い、
N H K が 持 つ 8 K スーパーハイビジョン に 対 応 できる
リアルタイム C G 化 技 術 を 組み合わせ ることで、太 陽 光 の 反射 までも 再 現 し た
高 精 細 な 「 はやぶさ 2 」 探 査 機 の 挙 動 や リュウグウ に 近 づ く 様 子 を、
まるで 近く で 見ているように 再 現 しました
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★ トピックス 探 査 機 から 分 離 していく MASCOT の 撮 影 に 成 功 !
10月3日に、ドイツ・フランスによって開発された小型着陸機MASCOTの分離運用を行い、
無事にリュウグウ表面に届けることができました。その後、MASCOTはリュウグウ表面で科学データを取得し、
そのデータは探査機経由でMASCOTチームに伝送されています。
今後、MASCOTチームによって科学的な解析がなされるものと思います。
探査機からは、3つの光学航法カメラ(ONC-T、ONC-W1、ONC-W2)を用いて、分離されたMASCOTを撮影する試みを行いました。
画像データを探査機から取得したところ、ONC-W1とONC-W2で撮影された画像にMASCOTが写っていることが確認されました。
図1は、分離直後にONC-W2によって撮影されたMASCOTです。連続的に撮影された画像のうち3枚にMASCOTが撮影されていましたので
そのアニメーション動画になっています。撮影時刻は、10月3日の10:57:54〜10:58:14(日本時間)ですが、
分離時刻が10:57:20ですから、分離直後に撮影されたものです。ONC-W2は探査機の側面に付いているカメラで
探査機から斜め下方向を撮影しています。
そのために、リュウグウ表面を背景にしてMASCOTが降下していくようすが分かります。
特に3枚目の画像にははっきりとMASCOTが撮影されています


図1 広角の光学航法カメラ(ONC-W2)で2018年10月3日、10:57:54~10:58:14(日本時間)に撮影された3枚の連続画像。
画像上辺にMASCOTが写っている。
1枚目 10:57:54
2枚目 10:58:04
3枚目 10:58:14
(画像クレジット※1:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研

また、図2には、ONC-W1で撮影されたMASCOTの画像を示します。
こちらは、10月3日の10:59:40(日本時間)での撮影ですので、分離されてから2分20秒後の撮影になります。
ONC-W1は探査機底面に付いていますので、探査機から見ると真下を撮影していることになります。
この時点で探査機は少し上昇しています。まだ着地していないMASCOTが白い点で、
またリュウグウ表面にはMASCOTの影が黒い点で映っています。そばには、「はやぶさ2」の影もあります
- 図2 広角の光学航法カメラ(ONC-W1)で2018年10月3日、10:59:40(日本時間)に撮影された画像。画像を拡大すると白い点と黒い点が見える。それぞれ降下中のMASCOT本体とその影に対応している。MASCOT像の右下の大きな影は、はやぶさ2本体の影である。
(画像クレジット※1:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
図2でMASCOTの白い点を拡大してみると黒い四角の中に白い丸い点があるようにみえます。
これは、MASCOTの底面が見えていると考えられます。
図3はMASCOTの底面の写真です。図2のMASCOTの拡大写真と比べると、白く光っているものがアンテナだと思われます。
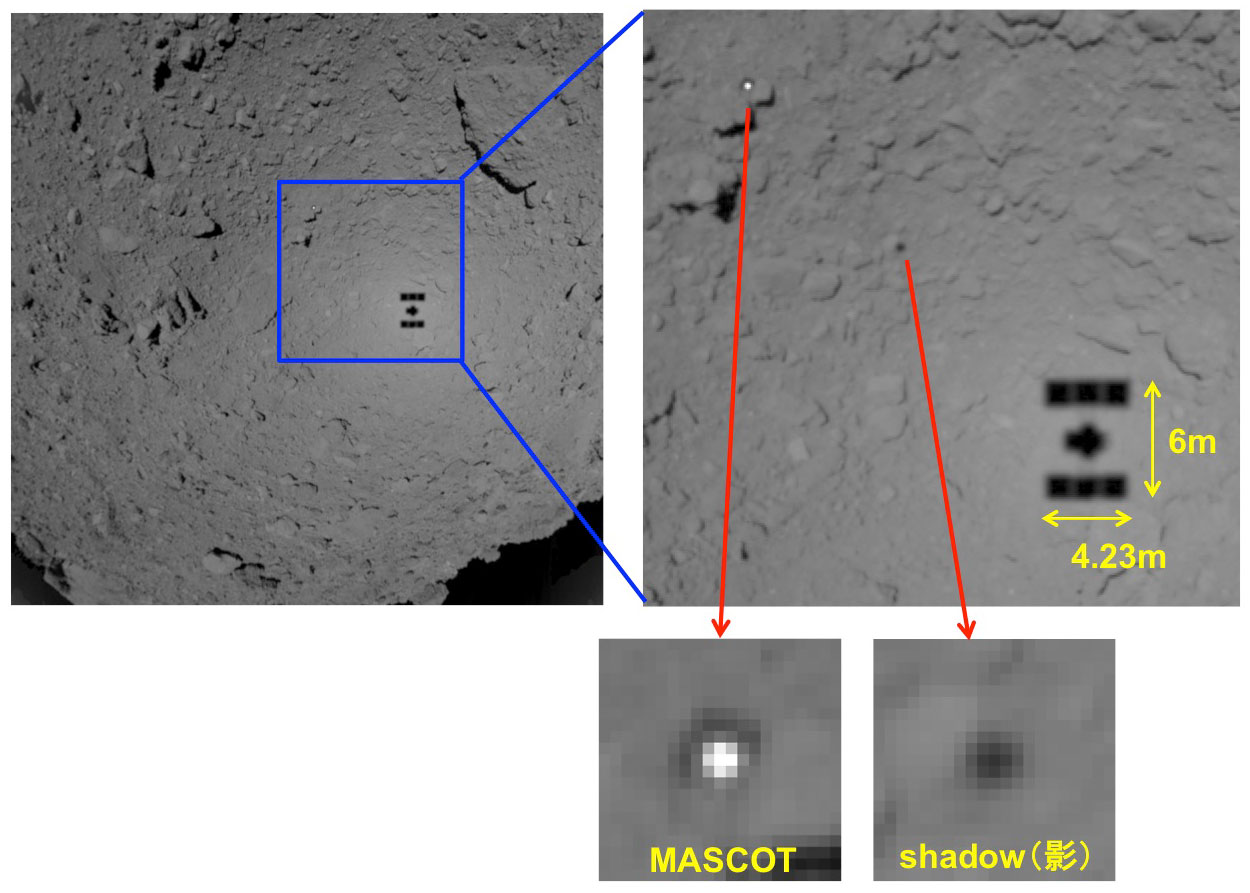
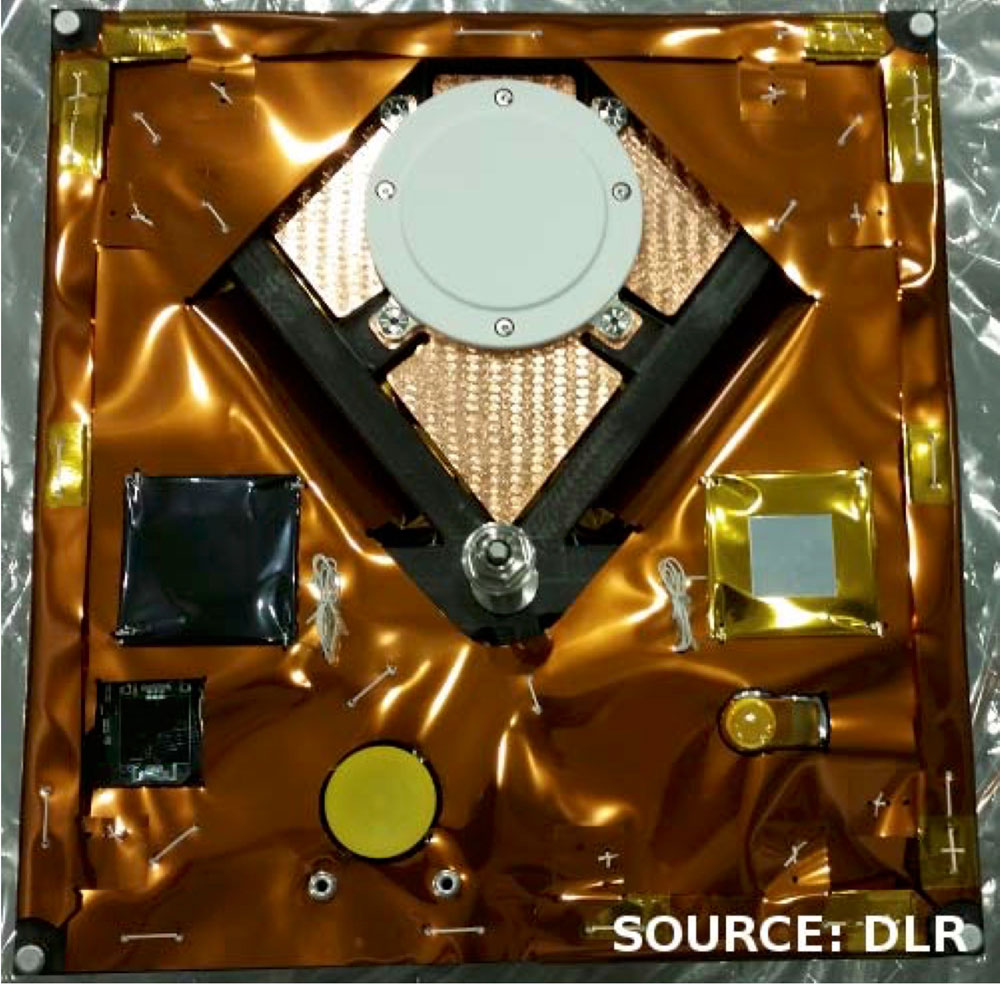
- 図3 MASCOTの底面。丸い白いものはアンテナである。(画像クレジット:DLR)
図2の写真に映っているMASCOTの高度は、約35m(※2)と推定されています。
その後、MASCOTはリュウグウ表面に降りて、約17時間に渡って動作し、探査機にデータを送ってきました。
なお、MASCOTが着地した地点も図4のように推定されています
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★ トピックス タッチダウン 運 用 の スケジュール 変 更 について
2018 10 17
小惑星リュウグウ近傍 での これまでの 探 査 機 運 用 結 果 を 踏まえて、
本年(2018年)10月末に予定していましたタッチダウンを延期して、来年1月以降に行うことにしました。
2018年内の今後の主要な運用は次のようになります。
・10月14日〜15日:TD1-R1-A(2回目のTDリハーサルに相当)
・10月24日〜25日:TD1-R3(3回目のTDリハーサルに相当)
・11月下旬〜12月 :合運用
1回目のタッチダウンを行う時期につきましては、上記のTD1-R3までの結果を踏まえて、
合運用期間中に検討する予定です。
このような判断に至った理由は大きく2つあります。
1つは、これまでの運用でリュウグウの表面状態がよく分かってきたこと、
もう1つは探査機の航法誘導の精度が分かってきたことです。
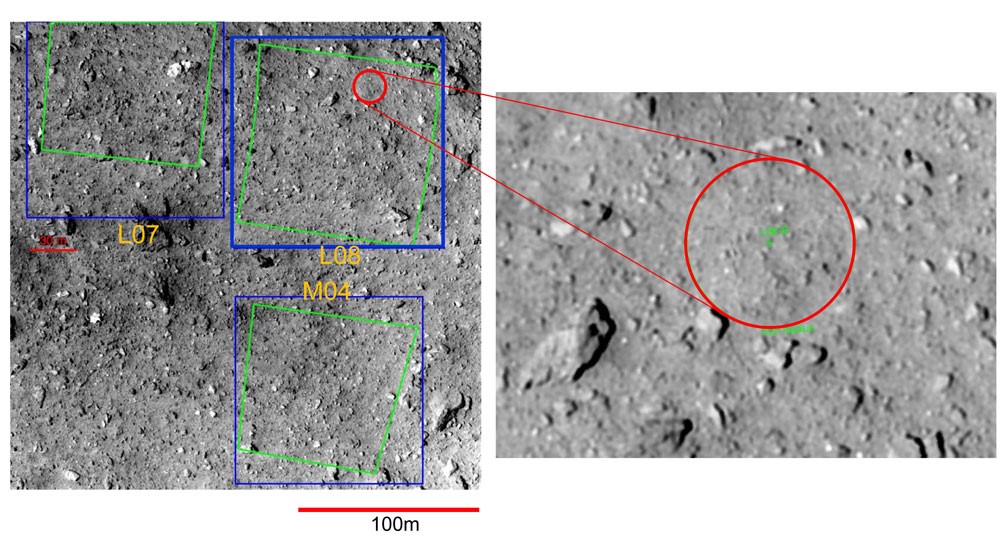
まず、リュウグウの表面ですが、到着当初から分かっていたように多数のボルダー(岩塊)で覆われていて、
広い平らな領域はありません。そこで、タッチダウンにとって相対的に安全な場所として、
L08、L07、M04という着地候補地点が選定されました。これらの候補地点について更に詳しく調べたところ、
これまで得られたデータでは、L08の領域の中の一部が最もよさそうだということになりました。
プロジェクトチームでは、L08-B と 名付けた 領 域 です ( 図 1
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
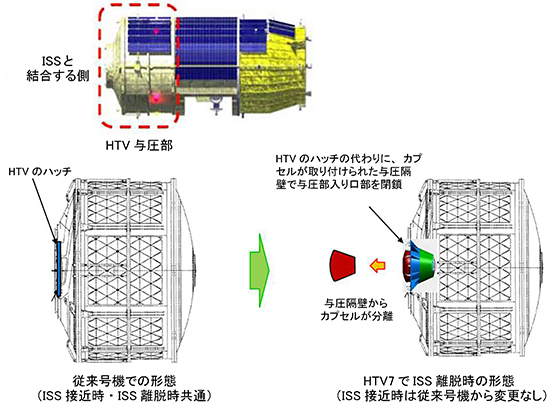
★ Jaxa レポート こうのとり 7 号 国 際 宇 宙 ステーション へ 物 資 補 給
2018 10 25 Twiter よ り

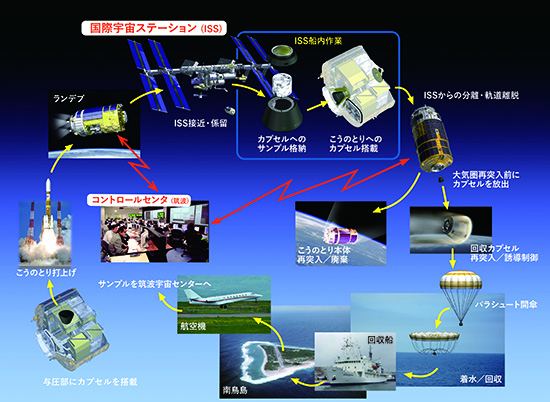
9 月 23 日 に 打ち上げ、28日に国際宇宙ステーション(ISS)に結合した「こうのとり」7号機(HTV7)によって、たくさんの物資が運ばれました。
「こうのとり」7号機(HTV7)が運ぶ物資は合計で約6.2トン。中には、「こうのとり」でしか輸送できない物資もあるのはご存知ですか?
今回は、JAXAの主な「お届け品」を紹介するとともに、今回の輸送のポイントも探っていきます。
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー ーーーー
★
























![アレシボ天文台およびジェット推進研究所によってレーダー観測された画像[1][2]](https://ja.wikipedia.org/wiki/%E3%83%95%E3%82%A1%E3%82%A4%E3%83%AB:NASA_1999_RQ36.gif)




{kind=link}